


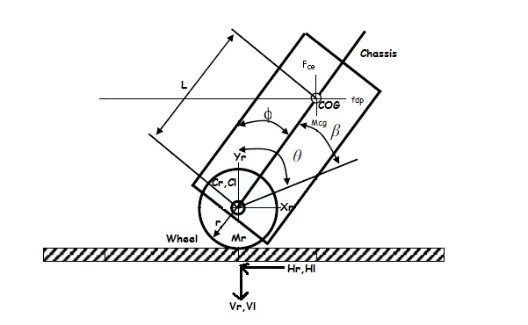
Two Wheeled inverted pendulum (balance robot)
I control this robot by using two PID , one for gyro and other encoder measurement 1-one PID for tilt angle to let a robot it standing up 2-second PID for displacement to let robot standing in one position first I tuning a tilte PID second I tuning displacement PID
self balance
- Actuators / output devices: DC Motors
- CPU: Arduino Mega
- Sensors / input devices: Pololu encoders, MPU6050