



Two Wheel Self Balancing Trinity College Fire Fighting Robot Contestant
Update 1/18/2016
There will probably be a new robot chassis. I think I was going about this the wrong way. The two wheel self balancing, the robot gripper that puts out candles, and a few other things were not such a good idea. Stay tuned.
Personal Backstory
It all started one day when I decided I wanted to participate in a robot competition. I first looked at the current LMR competitions and I couldn't find any decent ones. Then I went to my friend ggallant and he said this. He told me I should participate in the Trinity College Firefighting Challenge and so I did. This is my first attempt so far at doing the challenge. It is not complete but roles around in circles as I got the motors working.
The reason I am posting this as is and work in progress is that I feel I could use the motivation to keep moving forward. Thank you and I will enjoy all the love and support you give me even if it is negative. There is no such thing as bad press I like to say.
Present State of the Robot
The present state of the robot is awesome. It is at the very moment having moving motors and 12 volt power to the motors and the arduino. Right now all it does is move in circles but that won't be the case for long.
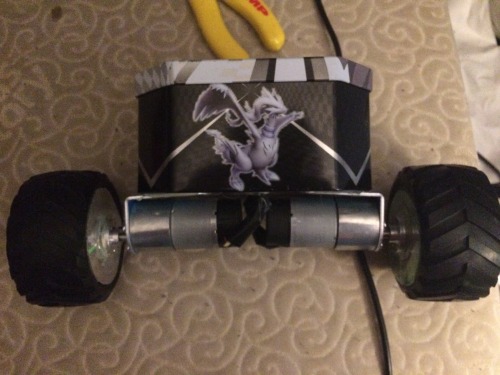
When I first got my idea for a chassis I grabbed a pokemon card tin and hot glued two motors with a mount attached to them to the bottom of the pokemon card tin. Then I drilled some holes so the arduino can make the motors run.

Then I used my Cytron motor driver and attached it to an arduino mega and got the motors to run. Then I hotglued the electronics to the top of the 8 AA battery pack and stuck it inside the robot.
Then I attached a motor hub to the robot and then shortly after wheels with hot glue. The wheels my dad stole from a few rc toys of mine. This is the robot so far...
The Robot's Future
The robot I have plans for it to self ballance without an IMU. I will use a ir proximity sensor to measure where it is leaning and ballance itself from there. For it to put out candles I have plans to use this gripper to smuther the candle.

Conclusion
None so far... Stay tuned...
Puts out candles with a robot gripper
- Control method: autonomous
- CPU: Arduino Mega 2560
- Operating system: Linux
- Programming language: Arduino, ROS
- Target environment: Trinity College Firefighting Maze