



Two shoes- the picaxe version
It was a tough decision to disassemble my first robot, but finally it came out well. It's "Two shoes", but the picaxe version. I actually didn't kept much, just the wheels, the gearboxes and the electronic parts( leds, diodes, transistors). The ultrasonic sensor was removed and and I'm using it for another project I'm working on and the Arduino UNO has the same story.
This is when I decided to change just the microcontroller, but le wild idea came into my mind and I went for a IR Sharp.
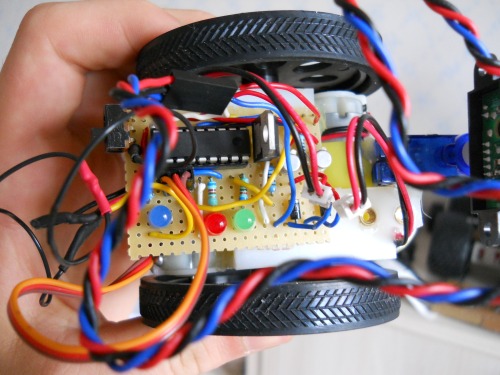
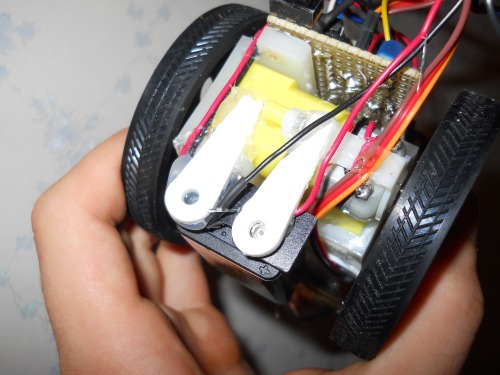
In the above image there is a motorcontroller from pololu, I thought about it, but then I decided to go with the old method, using transistors and schottky diodes (not sure if i wrote that well :| )
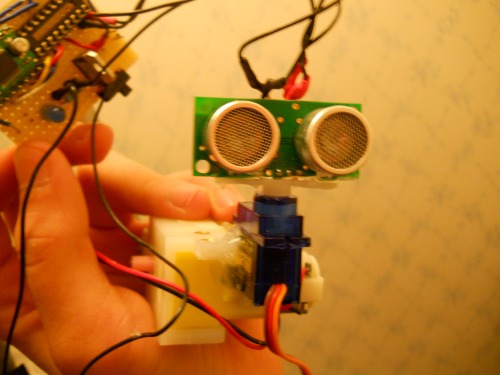
This down here is the finished pcb, but I still haven't changed the sensors.
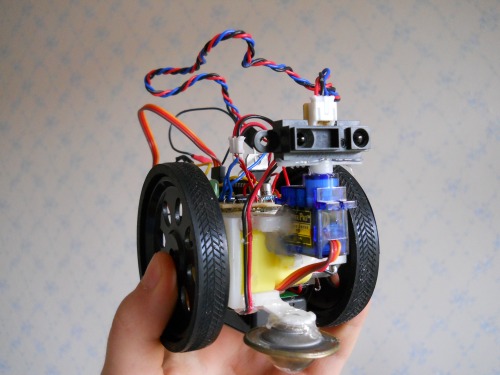
This is the first image taken with the IR Sharp attached to the system. The twisted wires are coming from it.
Underneath the robot I put the battery and a third point for equilibrum. I know that 9V batteries are not fine for motor apps, but I put a 5V regulator on the pcb. It works for moment, but I shall put 3 AA batteries and remove the regulator.

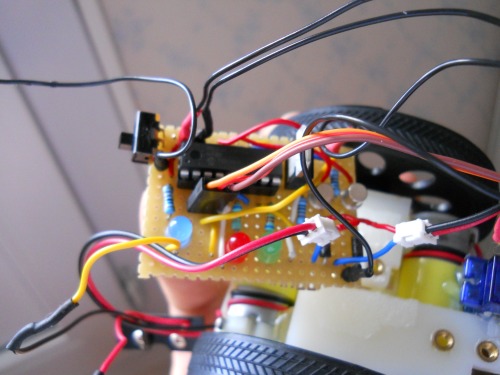
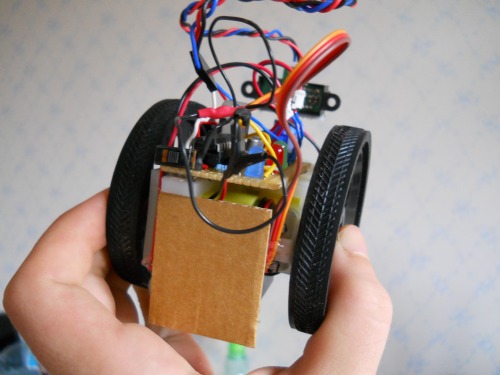
This is the back of the robot. I found out that the cardboard is a good mask for ugly things, so I used some.
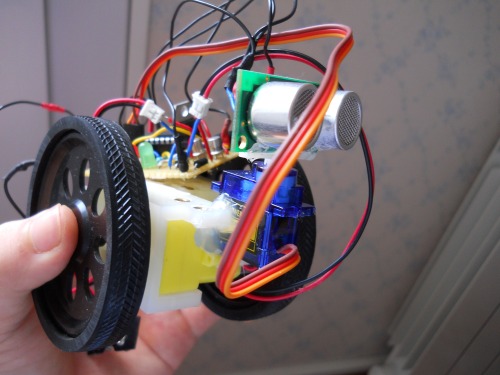
Here it is:
I'll post some videos soon, hope you like it!
It doesn't hit things
- Actuators / output devices: 2 geared motors
- Operating system: Picaxe basic
- Power source: 9v battery
- Programming language: Basic
- Sensors / input devices: IR Sharp
- Target environment: indoor