



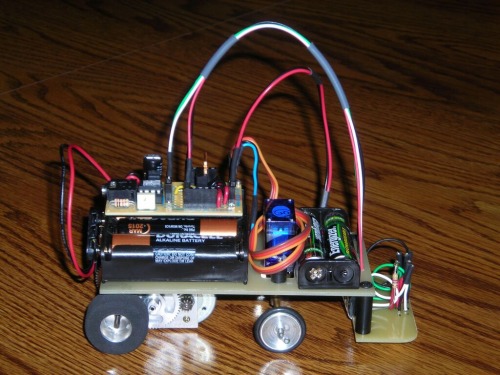
TV Remoter
Here is my latest Bot, modified from the original design. It started as a Line Follower that steered with a servo. That idea did not work as I planned so the bot was converted to a TV remote controlled project. I left the IR line sensors in place so if I ever got an idea to get it working, all it needs is a new program. A Panasonic #PNA4602M IR 38.0 khz receiver picks up the signal from the TV remote. The bot has stop, forward, turn right and turn left controls.
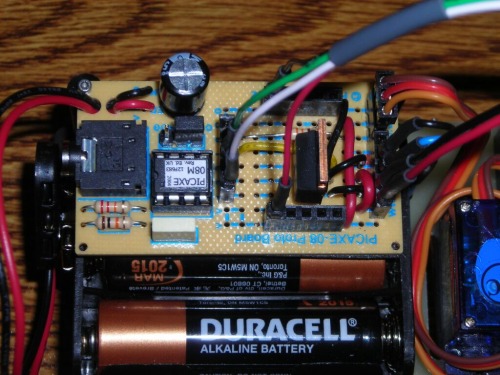
Brains of this bot is the PicAxe-08M chip and ProtoBoard. I added (4) 5-pin female headers to plug into and a 3-pin male header for the servo. The motor only needs to go forward, so a IRF510 MOSFET transistor was used for stop/go function.
Here are the Pins used:
Pin0 - Servo control
Pin1 - Gate of transistor motor controller
Pin2 - IR sensor, left
Pin3 - IR 38khz Receiver
Pin4 - IR sensor, right
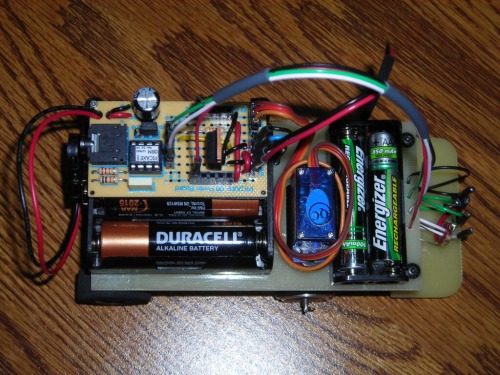
Chassis is made from 1/16" [1.6mm] G10 phenolic. Size is 2.25" x 4.25 [57mm x 108mm]. Overall length is 5.12 [130mm].
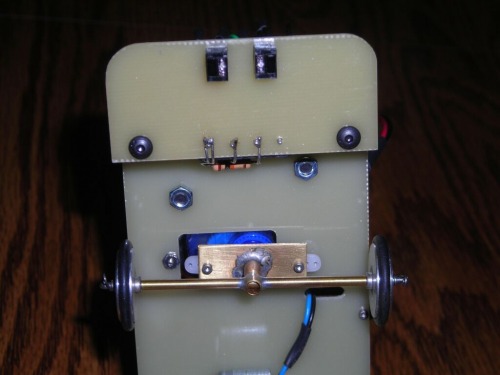
Gearbox was custom made using aluminum stock. The motor is from an old computer CD drive. These motors have lots of torque and operate well with little voltage. The gears, bushings, axles and tires are leftover slotcar parts.
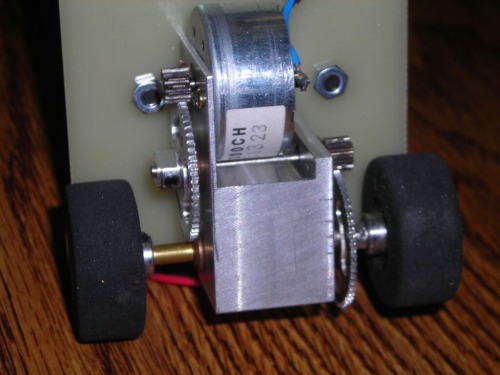
Gearbox Specs:
1. Overall gear ratio is 20.25 :1.
2. Motor voltage is 2.46 volts.
3. Rear Tires are 1.0" dia. [25.4mm]
Steering is done with a SG-90 Servo. It's arm is connected to a brass, soldered together, tubular assembly. The aluminum front wheels (again slotcar parts) are 5/8" dia. [16.0 mm] and 0.81" dia. [20.5mm] with the o'ring tire. Since there was only 2-ADC pins on the -08M left, I used (2) IR sensors, model #QRD1113. The code compares the b0 value to the b1 value to steer the servo.
Remotely driven by TV remote
- Actuators / output devices: Custom gearbox, CD drive motor
- Control method: TV Remote control
- CPU: PICAXE-08M
- Operating system: XP
- Power source: 4.5v to processor & servo, 2.4v to motor
- Programming language: Picaxe basic
- Sensors / input devices: 2- IR -#QRD1113 optical sensors, 38.0khz Panasonic IR Receiver
- Target environment: indoor, Smooth Surface