



TRM Navigation Robot
Updated on 2/15/09.
I've added a couple new pictures. Its running, but not optimized. Testing will follow, then I'll post some navigation video's, etc.
This is my navigation robot named TRM.
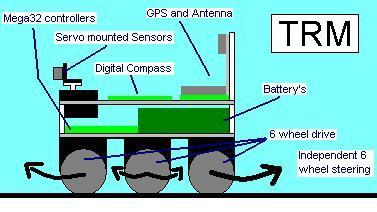





The game plan here is a simple small scale navigation robot.
But also to look visually interesting to promote robotics/science/technology.
I taught some of my local robotics group members with this robot build, as some of them have not built a robot before. So its construction wasn't as fast as I'd like it to have been.
The basic parts list is:
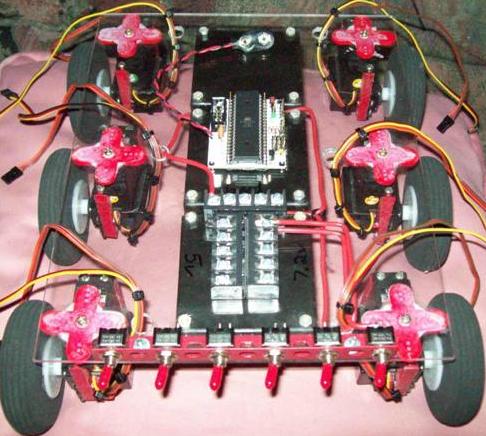
1 or 2 Wright Hobbies controllers - Atmel Mega 32
2 or more Sharp Long Range IR sensors (I've removed the sensor servos from the design, not needed)
Sensor mounts and switch mounts are hand made from aluminum sheet
1 Devantec Compass
1 Ashtech GPS module and antenna
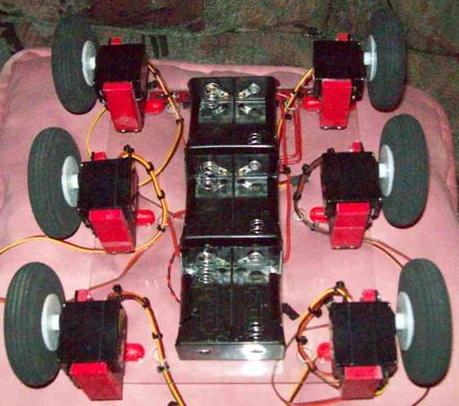
Battery's, I've switched to NiMH "D" cells instead of the LiPo packs for servo power
Controller battery's are parallel NiMH 9v cells
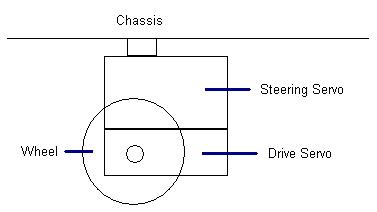
Servos - 6 Steering Hitech brand HS-311, 6 Drive GWS brand S03NXF
Servo mounts are hand made from Delrin blocks
Chassis is made from Lexan sheets, and hand made Standoffs
Wheels are Dave Brown Lite wheels 3" tall
General attachment - Servo tape is a wonderful invention (even better than duct tape!!!)
Programming - I prefer to use Bascom for Atmel microprocessors
Its running, but I'll add more later on.....
autonomous navigation
- Actuators / output devices: 12 Servos
- Control method: autonomous
- CPU: Atmel Mega32
- Power source: 7.2V NiMH from 6 D cells
- Programming language: Bascom Basic
- Sensors / input devices: Long Range Sharp IR
- Target environment: indoors/outdoors/small areas