


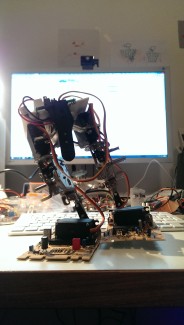
trashbot v2: less shakey, faster walk, improved electronics
this is the next evolutionary step from my trashbot version 1. i decided that i want to build more robots made from recycled mechanical parts instead of shaping parts or buying parts. so this version is made from a recycled pcb, harddrive holders, the SHIFT mechanics from an olivetti lettera 32 and some parts from an old bike.
it also evolved in electronics in that i added a relay between the arduino and the servos to keep the system from dancing while the arduino "boots".
see the full description of the evolutionary steps on my blog: http://assadollahi.de/trashbot-version-2/
suggestions for improvements welcome!
walks on two legs using four servos