



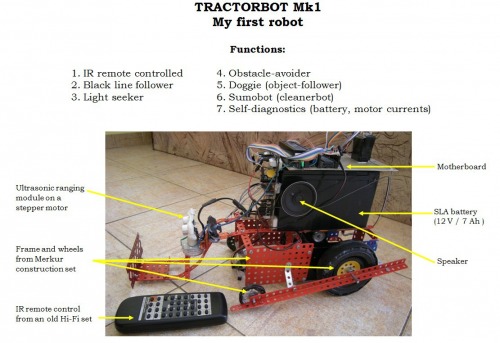
Tractorbot Mk1
Hi all at LMR, I am a 11-year-old boy from the Czech Republic and this is my first robot. It was made just for learning and testing of robotic sensors, motors and software, so its design is quite simple and slow moving.
Characteristics:
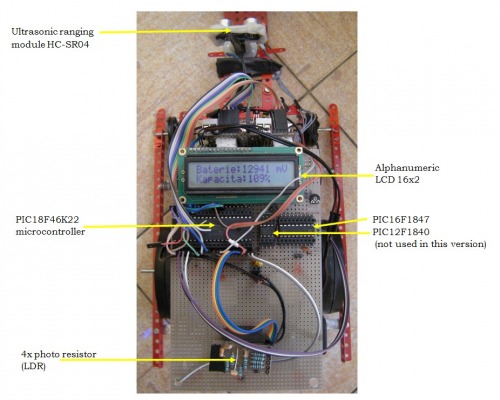
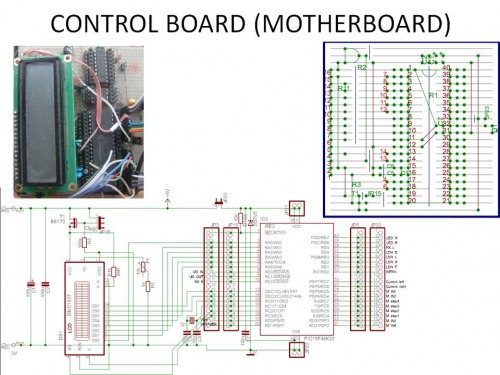
- MCU: PIC18F46K22
- Programming language: C (the code is attached)
- Power: SLA battery 12 V / 7 Ah
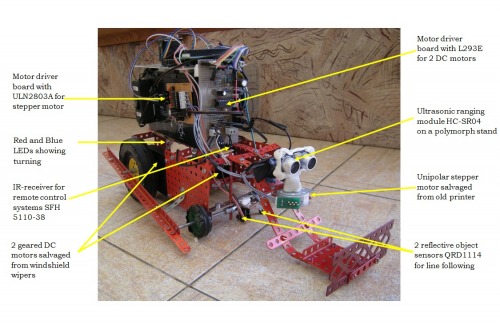
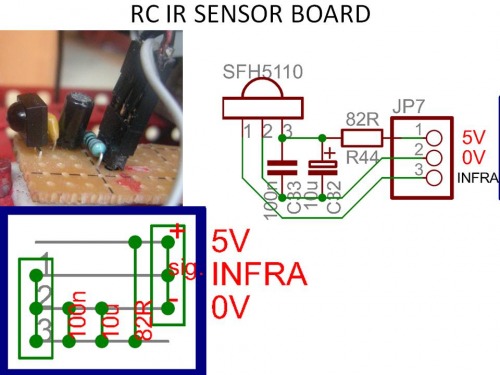
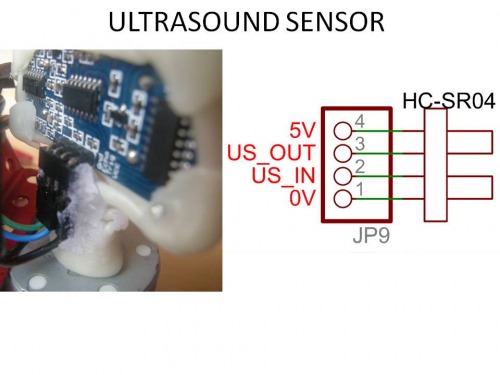
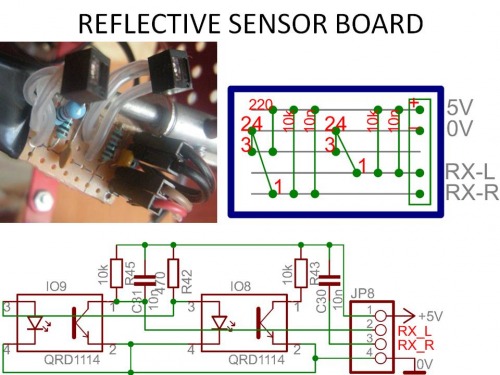
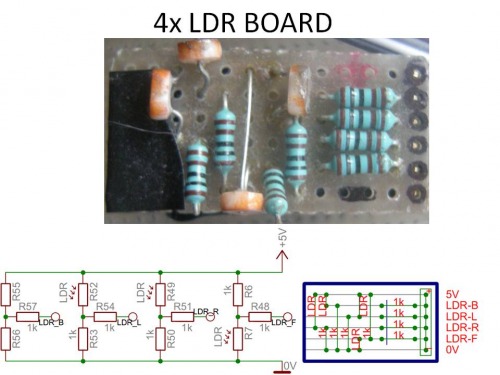
- Sensors: ultrasonic ranging module HC-SR04, IR-receiver for remote control systems SFH 5110-38, 2x reflective object sensor QRD1114, 4x LDR (photo resistor)
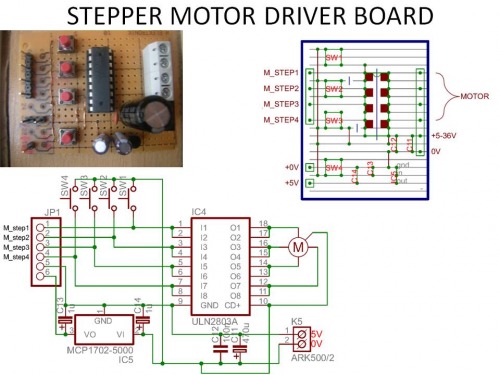
- Motors: 2 geared DC motors from truck windshield wipers,1x unipolar stepper motor from an old printer
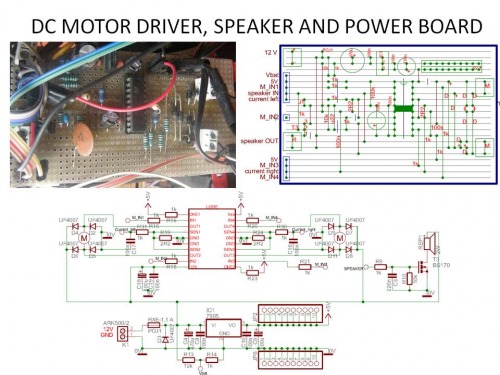
- Motor drivers: L293E (for two bidirectional DC motors with current measurement), ULN2803A (for the unipolar stepper motor)
- Display: Alphanumeric LCD 16x2
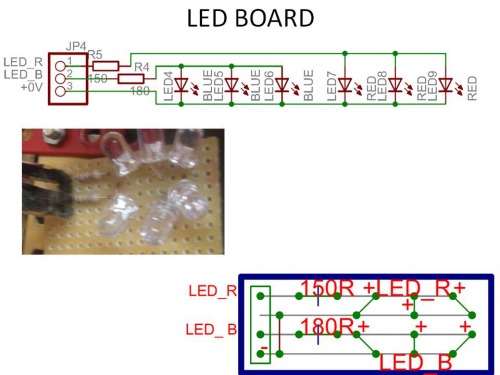
- Other outputs: 2.5W speaker, 3x blue LED, 3x red LED
- Control: Autonomous or IR remote controlled
- Mechanic parts: Merkur construction set (Meccano-like)
- PCB: Universal line PCB e=0.1”, the functional and soldering schemes in Eagle CAD are attached
- Target environment: indoor
I want to prepare the next version of Tractorbot Mk2 for a national competition in radio-electronics of youth and then to participate with it at the Czech robotic day in Spring 2015. Hope to see some of you there :-)
Intended features of the new version:
- A single board with MCUs and motor drivers, with remote sensors connected by IDC connectors and flat cables (not such a cable jungle like in this version)
- 2x PIC18F46K22 with mutual UART communication, one for graphic LCD and sensors, the other one for motor controls (a “multi-servo”)
- Two more stepper motors for a robotic hand (for Bear Rescue and Ketchup House contests)
- Total current measurement with a current shunt monitor
- Color sensor TCS3200
- Compression sensor made of ESD foam for a robotic hand (thanks OddBot!)
Thank you for your comments and suggestions. Meanwhile, have you all nice Xmas with your robots!!!

IR remote controlled, autonomous line follower, light seeker, sumobot, obstacle-avoider and obstacle-follower with PIC18F46K22