TrackRobot
Specs:
--> size: 500 mm X 500 mm or 20" x 20"
--> weight: 60 kg or 130 lbs
--> payload capacity: 160 kg or 350 lbs
--> ground clearance: 80 mm or 3.15"
--> max speed: 4 m/s (cca. 15 km/h or 10 mph)
--> max torque: 30 Nm or 22 ft lbs on each track, total 60 Nm or 44 ft lbs
--> run time: at full power 1 hour (3000 W)
--> 2 motors: each 1000W 48V
--> 1:8.25 gear reduction
--> battery: 48V 2kWh
Custom Arduino motor controller:
--> Arduino Mega
--> BTS7960 module 2PCS
--> Source code: https://github.com/Hrastovc/Arduino-TankDrive
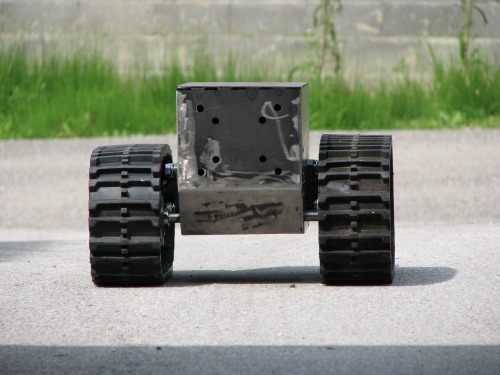
After two years of planning, assembly finally began:

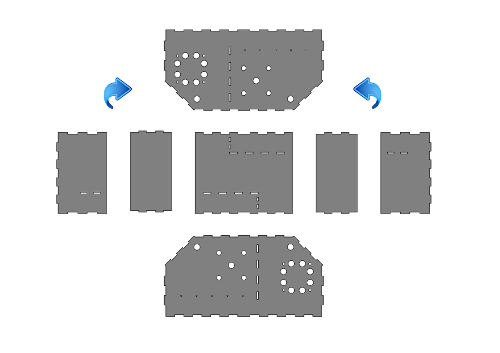
Laser cut steel:


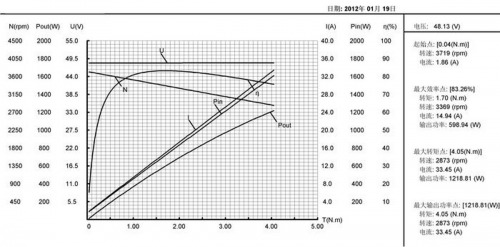
Motor characteristics:
Assembling the "shell":


Lots and lots of screws:



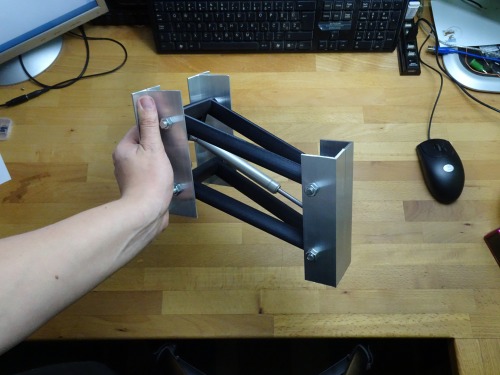
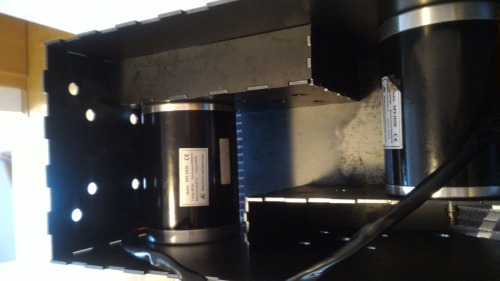
Basic structure with integrated motors:


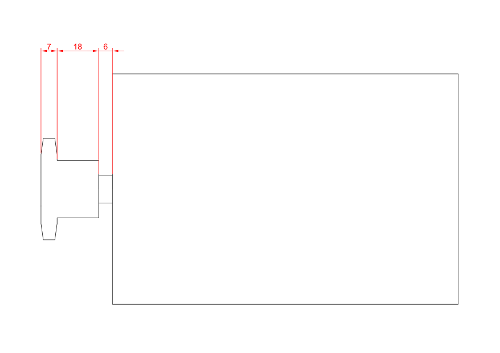
Shaft specs:
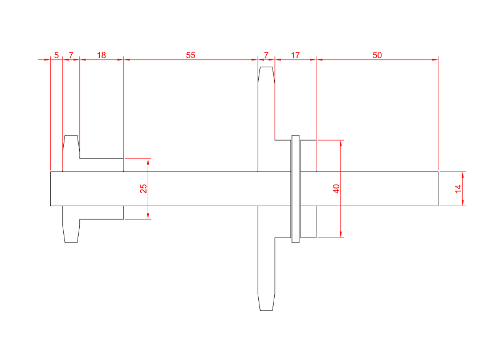
Smaller sprocket (on the left) should be welded on, but only on the left side and not the right side.
The bigger sprocket should be fixed with a pin through the shaft (needed for assembly sequence).

Sprocket on a motor shaft:
Chain drive:
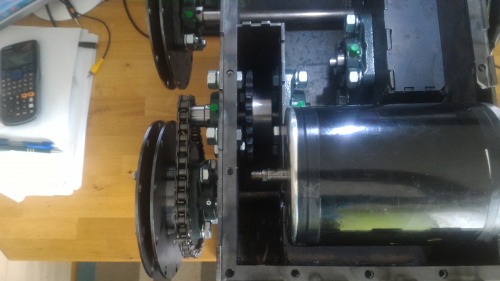


First testing:





----------------- UPDATE #1 -----------------