



Tracked robot "EVR2"
Two gearmotors 24v, 120 rpm Construction: alluminium with anodiziring
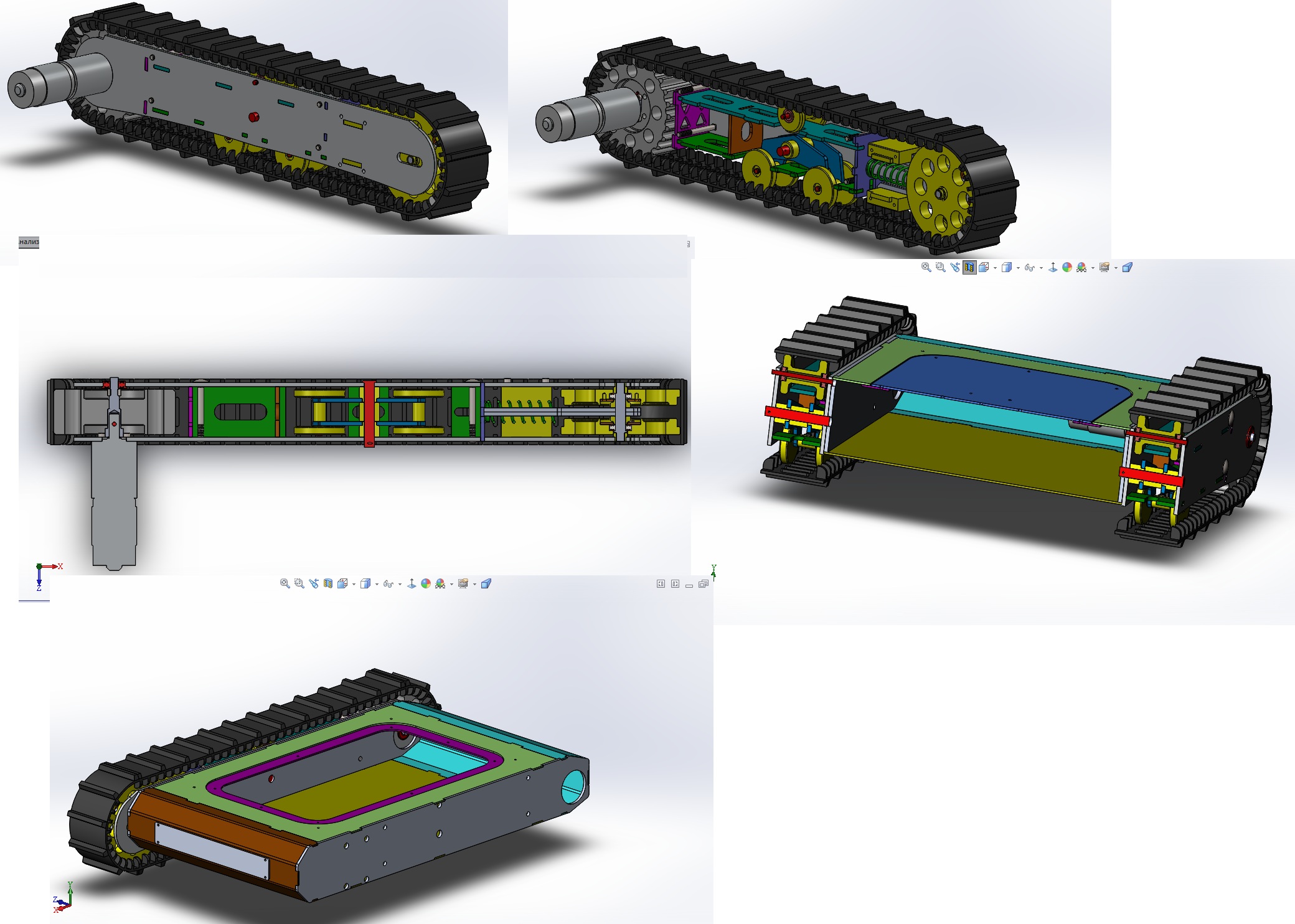
This robot was designed in a program SolidWorks 2014.
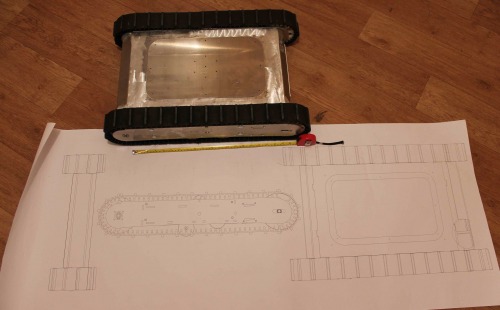
I bought only rubber tracks and motors. Rubber tracks had designed in company from China. I chose just type of the track and they did length which i need.
Gearwheels were made from copolymer (Coprolon). Wheels with power from motors has teeth , other wheels has no, they only bald.
First of all , my idea is modular conception of robot. Two tracks are singles. Each of them has their motor and frame. It can be installed on another base of robot.
For adjustments of a length of tracks i made belt tensioner with springs.
In the middle of the frame i made suspension bracket with two pair of bald wheels.
For protection and good view i was ordered anodizing of frames after welding. Anodizing has thickness 20 microns.




- Target environment: indorr and outdoor