



TRACAR
Hi LMRs again
I've started designing a new robot which will be semi-autonomous. I got a set of Tamiya 70100 tank treads. Quality is good for hobby but for a good robot won't be enough these threads. I was thinking on developping an application that will control the robot via bluetooth.
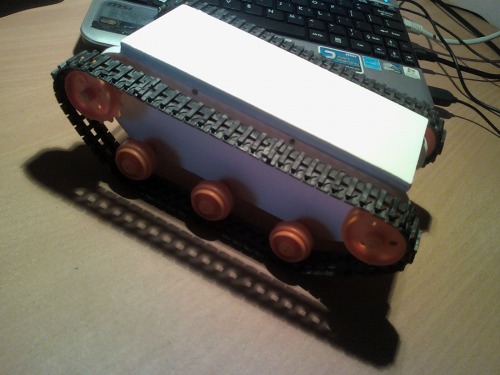
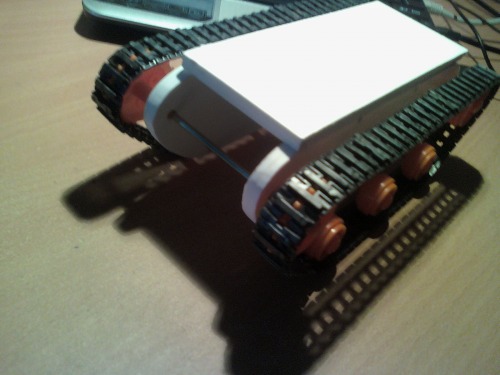
First step that I did was construction the chasis. Here is some images about the chasis. It's not finished yed but I'm working on it. This is how it looks now. Pretty ugly but that's my first home manual made chasis from expanded PVC.
Some time ago I was trying to build the chasis from Lego tehnics but I got that dream away. For those interested here are some pics about it. It was having a suspension too but it needs more than 1 kg to be pushued down :|

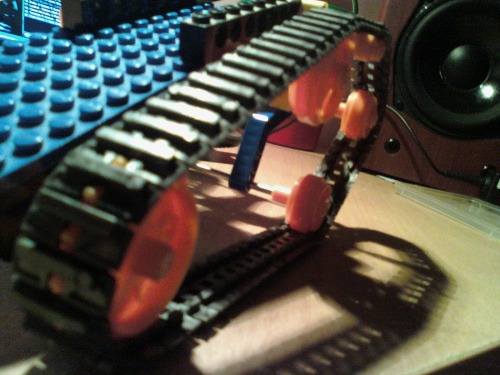

It was having a suspension too but I had to forgot the ideea because the standars was different. I mean that the wheels were moving left to right and the threads oftenly jumped off the sprocks.
I was thinking than about controlling it via Bluetooth. Bluetooth is a great toy if you want to play around with it. So I've started designing an app which will send data through the serial port cause the Bluetooth can connect to the robot and make a virtual serial COM port. Simply designed the GUI, added a combobox, and when the Form loads, I simply used the GetPortNames() to detect the ports, add them in an array then the array is imported to the ComboBox, so when the app is started the combobox will show the available serial ports. When a serial port is selected simply click the "Connect button" and I used the serialPort1->Open(); command.
Here are some screens of the application, but it's still under development. I've tested it out via virtual ports, it sends out data so no problem.
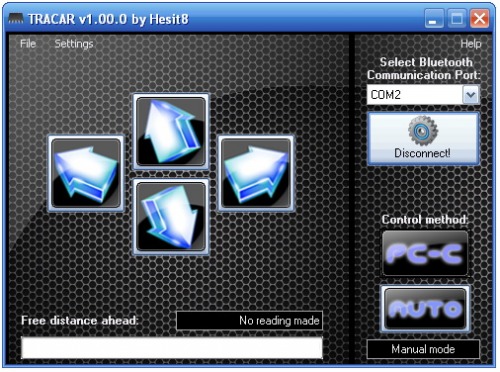


The data sent out is W A S D N M characters, W for forwars, A for turningg left, S for reversing, D for turning right, N for autonomous mode, and M for manual mode. It has a progress bar under the distance box which starts filling if the distance is lower than 40 cm and I hope that I will make it to beep if the distance is 10 cm or bellow and will refuse to send W data to the robot until the distance isn't big enough. The robot can be controlled via WASD buttons or by clicking the buttons.
Just these right now but later I will add other progress as I will develop this thing :D
Navigates around avoiding obstacle or bluetooth controlled.
- Actuators / output devices: tamiya dual motor gearbox
- Control method: autonomous and PC controlled
- CPU: Intel Atom N450 and Atmega8 orr AtTiny2313
- Operating system: Windows XP/Vista/7 with .NET Frameworks 3.5
- Programming language: C++, AVR C
- Target environment: indoor