



Inspiring by a tank track which can move on any terrains, first we need to find the right track for our robot. I tried to get the part from snow blower part dealers, but ended up getting a broken track drive snow blower, the engine was gone, but the track is fairly new, so here is what I got for $50:

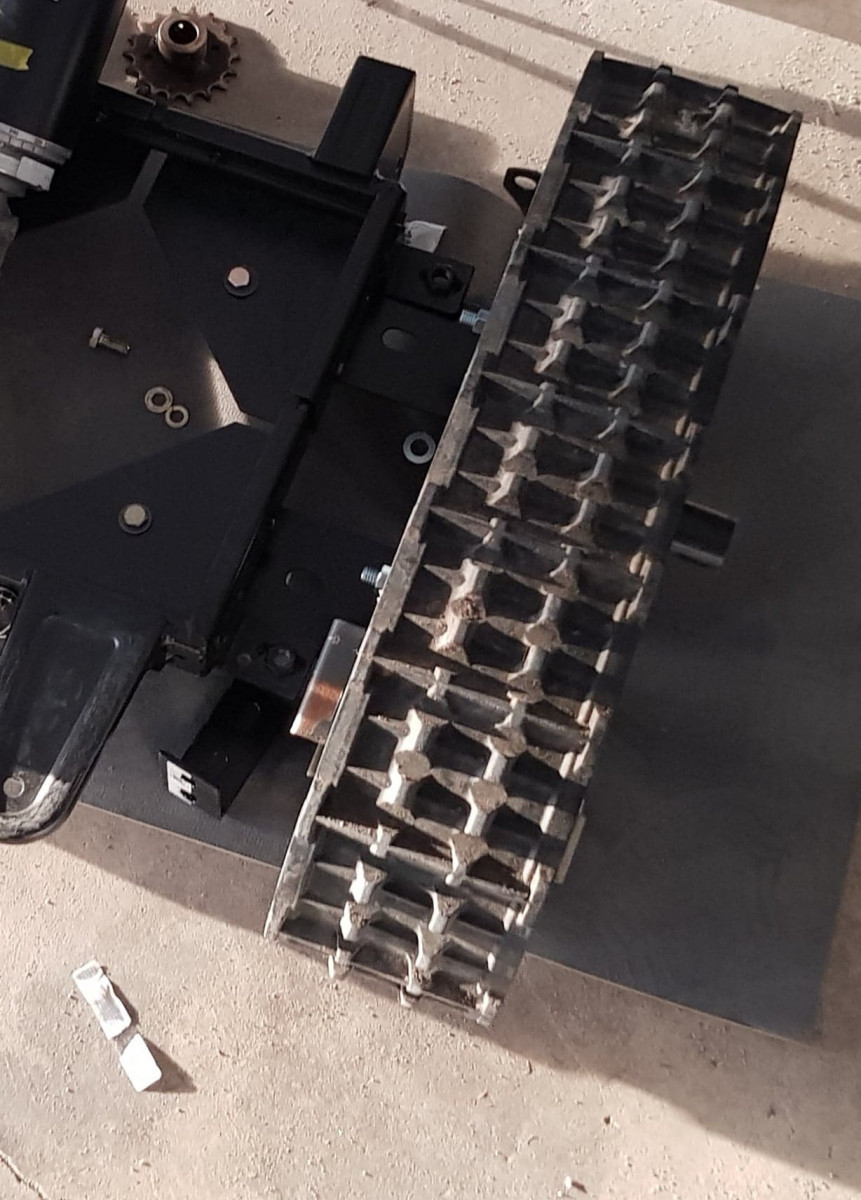
Closer look on the track: it has chain and sprocket inside, with a shaft side around 3/4", I measured it and got 19.1mm.
 Taking the track is not a hard task, slowly removing nuts and bolts around, here is the pair of track with all sprockets:
Taking the track is not a hard task, slowly removing nuts and bolts around, here is the pair of track with all sprockets:

For the DC motors, I planned to use 12V DC geared motors, but I found that I have few LiPo 6S batteries which I can share with my e-bike! Thus finding a 24V geared motors from a used wheelchair is the best option!
Looking around online sites, and used wheelchair costs around $300-400, that's expensive. Luckily, I got fairly new one from a high school teacher, he got the wheelchairs from someone else, and just want to get rid of it for $200. I checked the model Invacare TDX SP and just wow, it costs $8000 after tax.
Here is the wheelchair which I removed the chair! It was quite heavy for just me to move around.
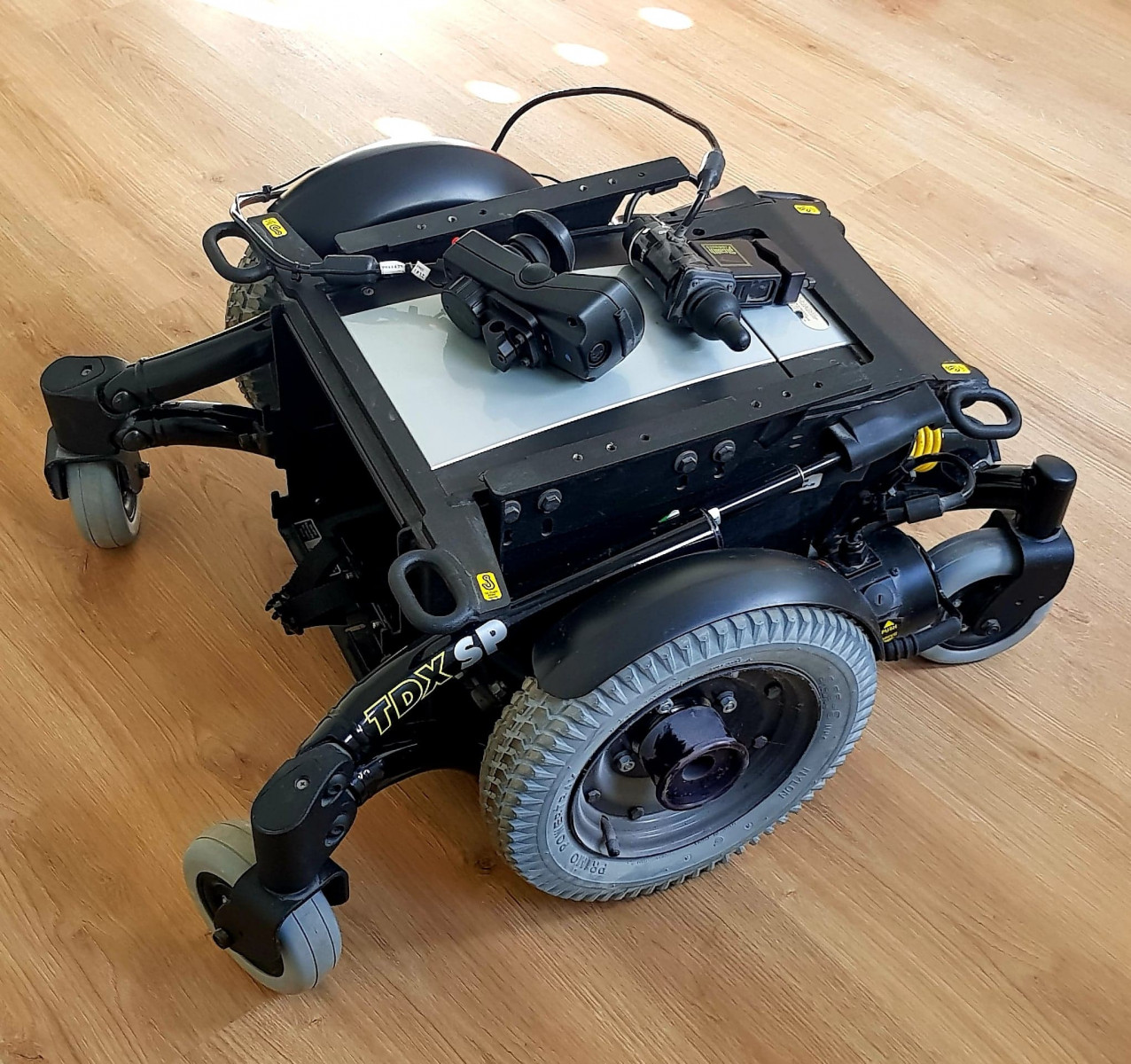
The wheelchair has 4-pole motors, which offer 5.8mph top speed! Easily push 300lbs-400lbs payload!

Finally an hour of work, we got a beautiful pair of motors, it has magnetic brake as well, but we don't need it (can be removed easily):

I did search quite a while for a decent motor controllers, and found that Sabertooth 2x32 Dual motor controller from Robotshop is the best one. Sabertooth motor controller has the best design, super smooth and flexible to set the parameters as well. It's a little bit more expensive than other controllers, but for the heavy-duty project like lawn mower or snow plower, we need a very stable and high build quaility, if the controller fails, the robot can push into your car, your fence and we all have the responsibility to fix it! (Oh no!)
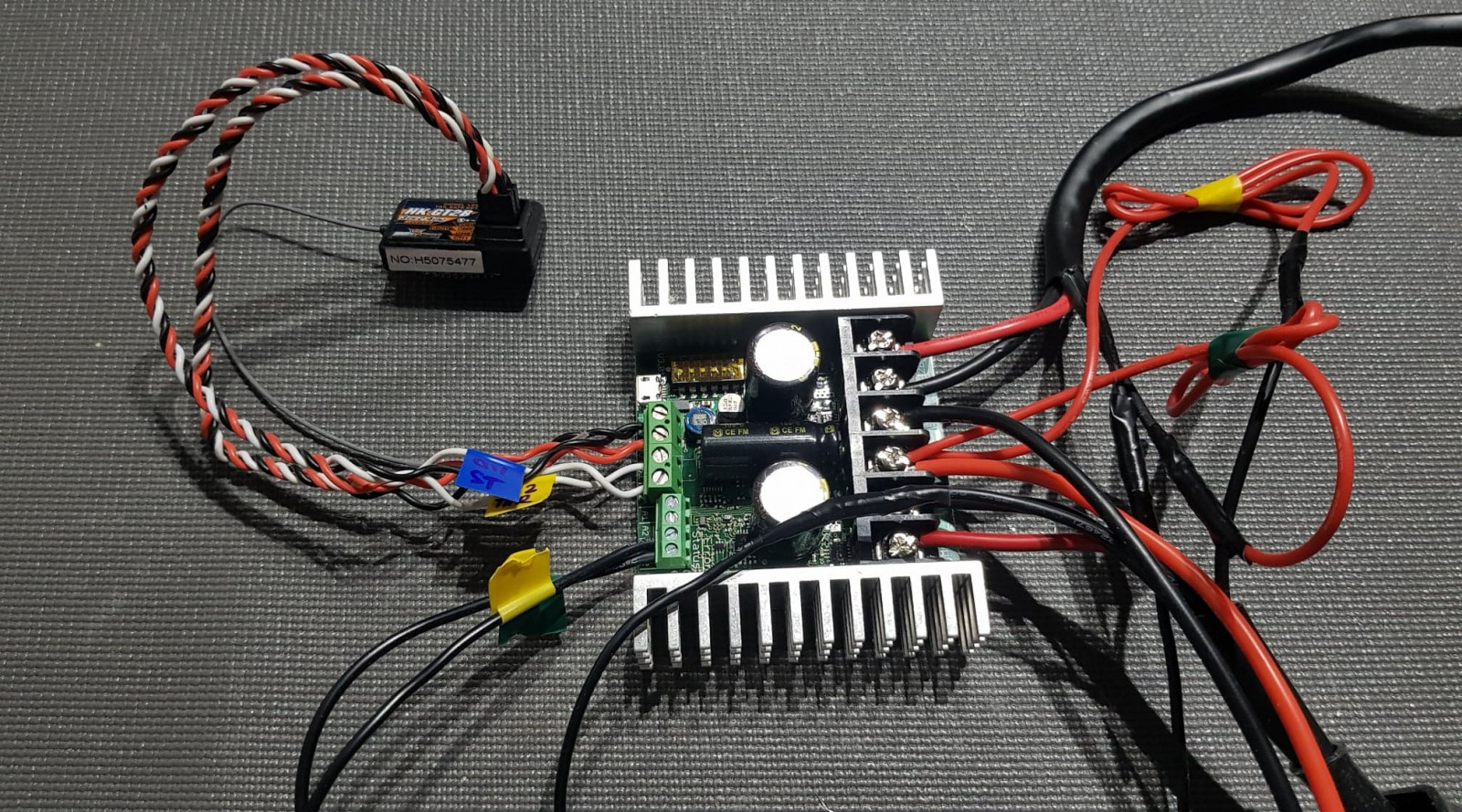
I used the 3 channels remote controller from my RC monster truck for testing, it's a cheap HobbyKing radio and receiver, but it has fail-safe, when it lost the signal from the transmitter, it will output neural position, it's that what we want the robot stop moving and not hitting anything in this case.

You can feel the power:
When searching around how to build a steady frame, I luckily found a Mastercraft mobile base, it's multipurpose mobile base for just $39.99

It has a very strong 4 corner plates, and slotted steel frame as well.

We will think how to mount the mobile base with 2 track drives on both side, with adjustable space for putting the motors on like this:

L-shape with heavy duty steel comes to rescue! I found Lowes selling very thick and strong metal steel, it has various side and shapes, the one we interested in is L-shape, which we can mount it to the inner panels of track driver, and easily put the mobile base on. First, drill 2 holes, 3/4", to mount the corner bracket:

Put the L-bracket on:

How about putting back the sprocket and tracks? It looks definitely good

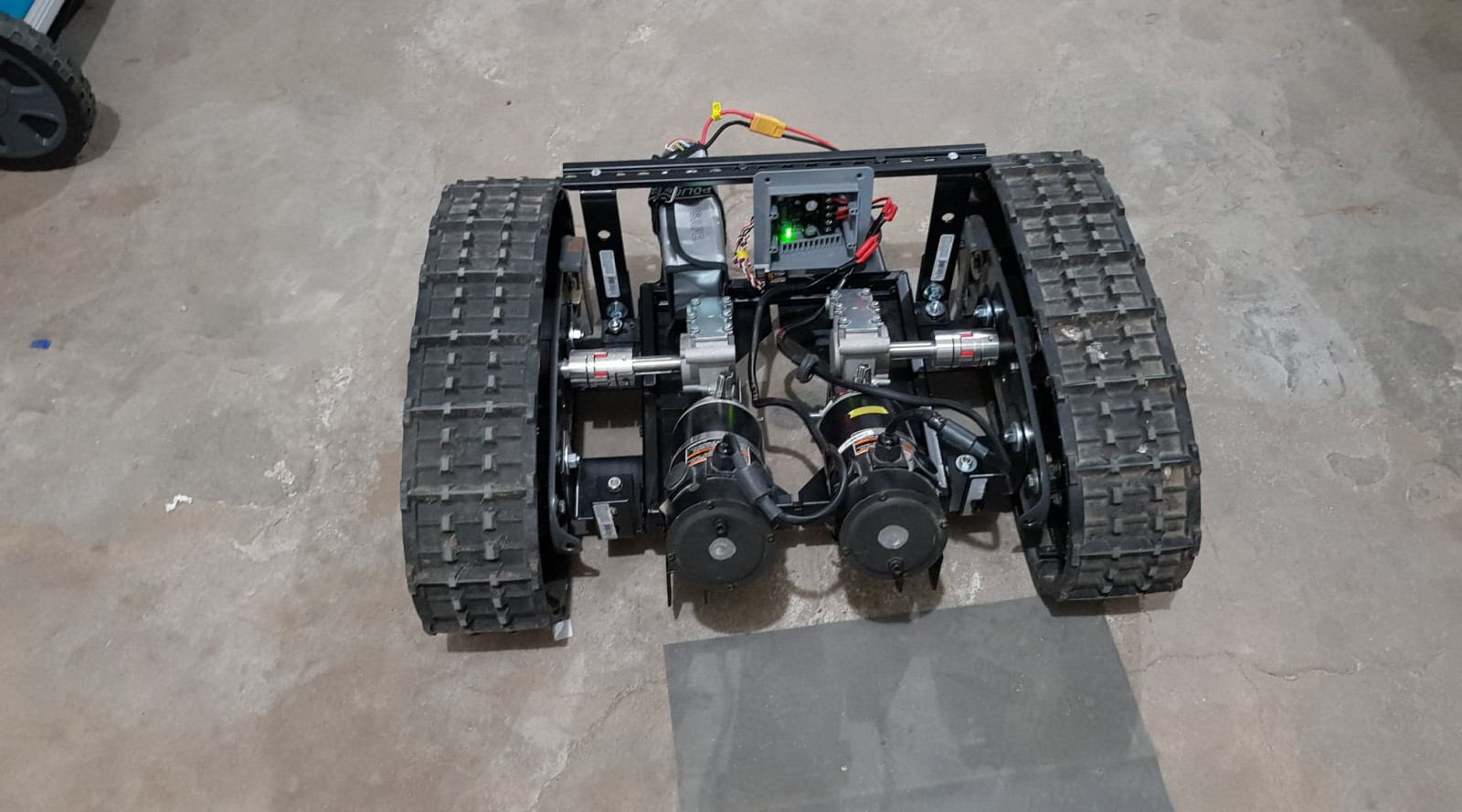
Now adding the base on top, secure with 3/4 nuts & bolts.
The key point here is choosing the right shaft coupler, luckily I found the shaft coupler which can provide flexibility, both shafts can be unaligned a little bit:

The shaft to the sprocket and motor shaft finally are connected using the coupler above, strong enough!

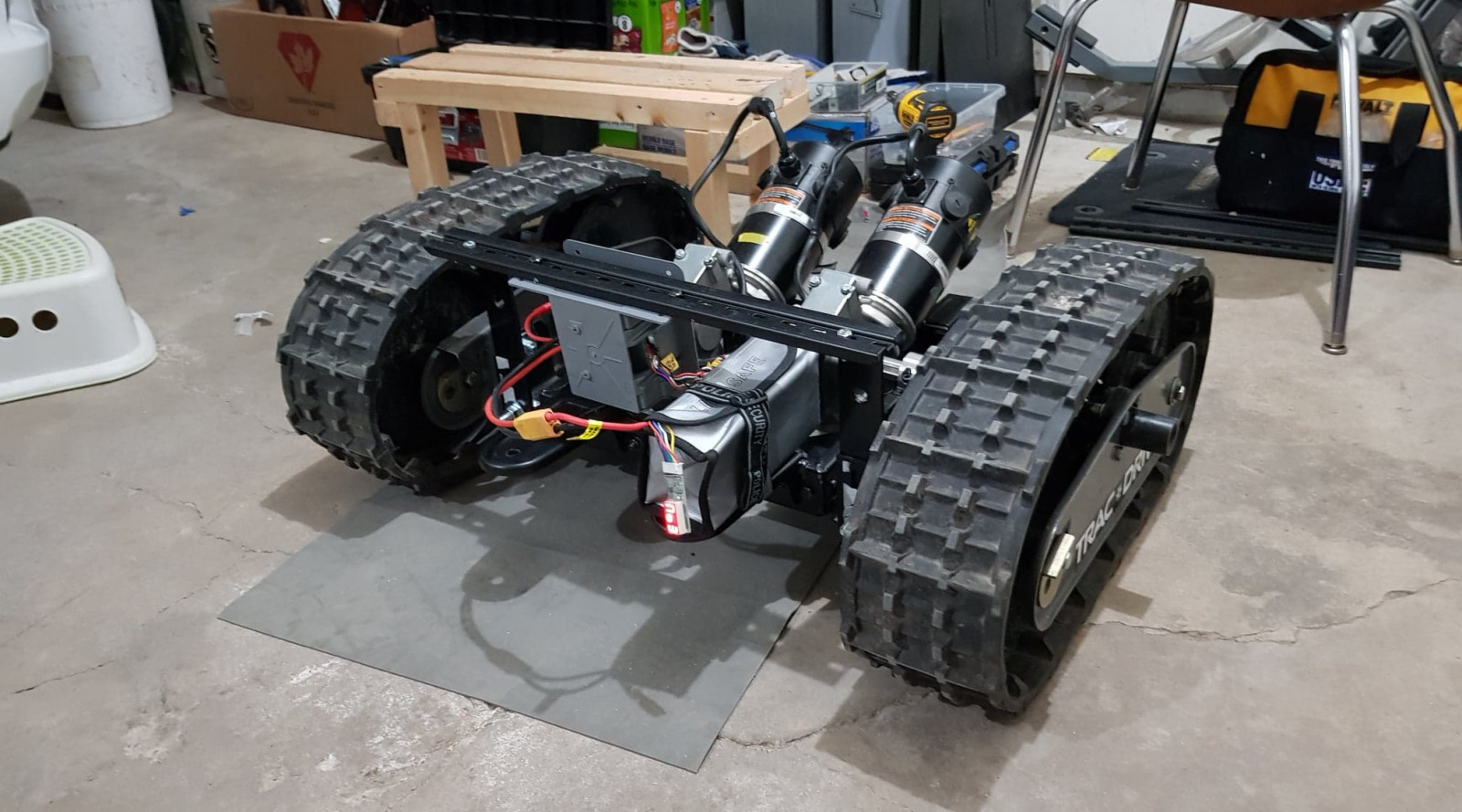
Put all together, you can find any place to mount the battery, using old fuse box (connector box) to put the Sabertooth into.
On my updated design, the electronics are located inside a 3D printed box and frame, I got my 3D printer parts from 3D Printing Canada

From the back:
And see it in action
Now you can think about the lawn mower! I have two ideas for that
- Mount a reel mower in front of robot?
- Mount a string trimmer under it?
 ------------
------------
Updated Nov 2019!
It snowed already, so here is the video of the second idea: snow plower!

WINTER FUN:

