



TinyTrack
This is another similar type of "Start Here" robots. Wheels, MCU, IR sensor etc.
Just trying to build a smallest robot I'd ever build. Thanks for Chris's NANO Undershield. It's a great shield for small project and also the first time try to use encoder.
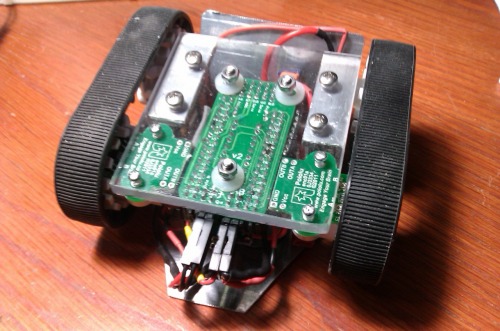
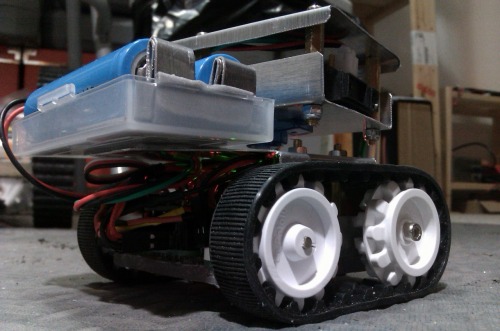
I use the small track from Pololu 22T track with their encoder and mini motors. They are great combination for small robot. The only thing need to be made is the chassis.

Using polycarbonate for base, it's much stronger than acrylic. You can see 2 encoders and undershield inside.
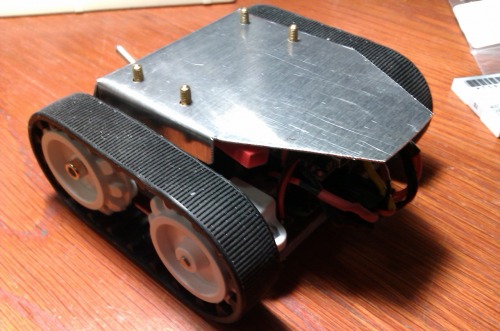
Made this body plate:

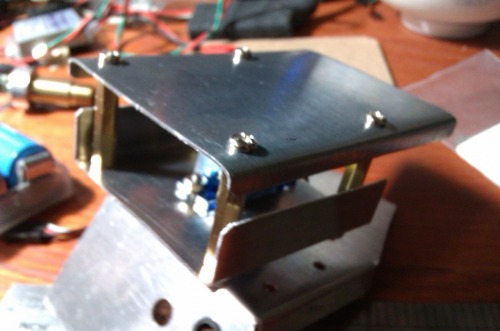
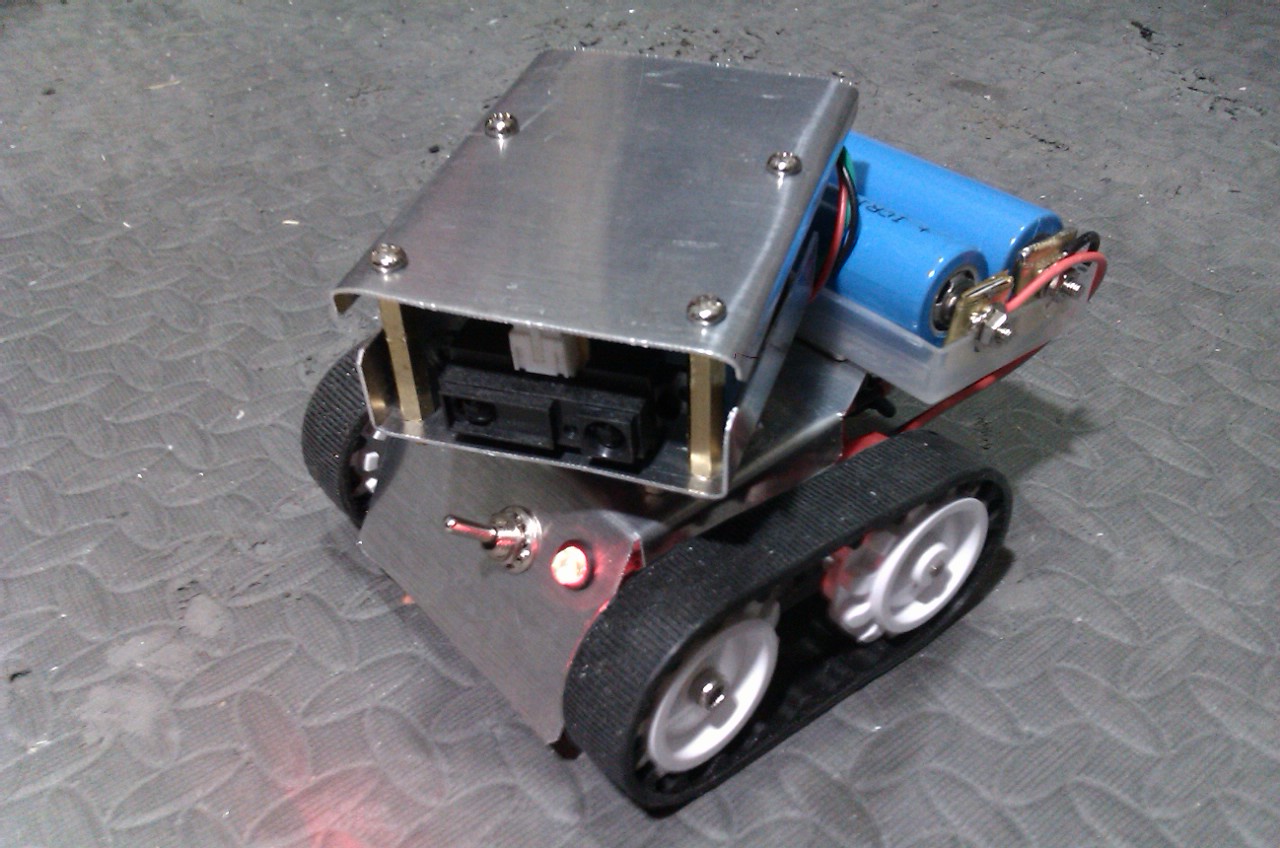
Make another case as head for IR sensor and servo.
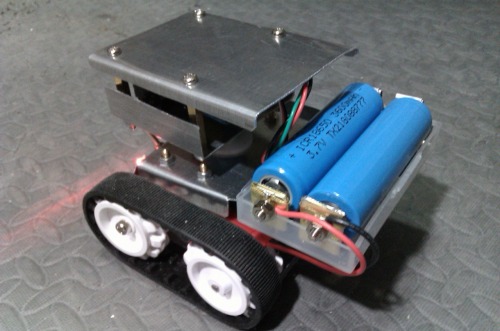
Make the battery carrier using original battery case. (2 Li-ion batteries at back)
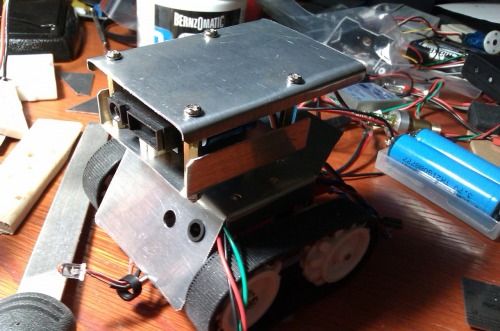
Chassis complete
More pics for show:
My biggest robot and smallest robots...

Now, I am working on programming part and figure out something weird on encoder. Because lack of extra digital pin so I use analog pin instead. Left track was reading fine but right track is reading slowly in between 1 and 0 or 1 and 2 and so on...
Well, other that that, the screw for track is also another headache because either getting tight when go forward or getting loose when backward. Arrrrrr........... too many detail need to be fixed. I will update it once I get it done.
- Actuators / output devices: 2 Pololu 1:100 micro gear motors
- Control method: autonomous
- CPU: Arduino Nano
- Power source: 7.2V Li-ion 5000mAh (2x3.6V)
- Sensors / input devices: SHARP IR sensor
- Target environment: indoor