



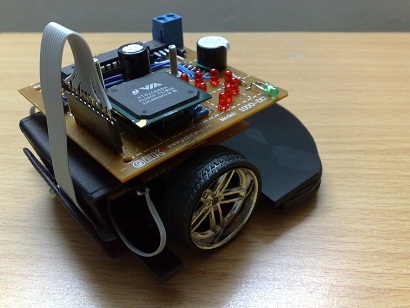
tiny line follower (8 sensors)
some say "linefollower" robots r the best choice for learning the robotic.actually my first robot was an analog line follower too!
last year i made this one just for fun.the idea was making a brand new sensors plate.
so i didnt use any board for ir sensors and just hid them between two plates and drilled one side to insert the sensors and LEDs.
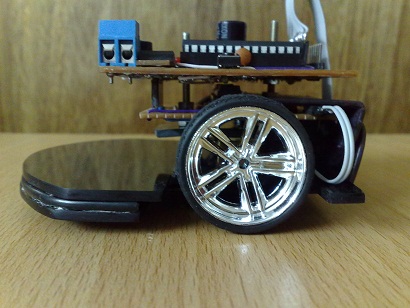
for more noise-reduction the plate is too close to the surface.by this technique the FC lamps/bulb lamps/sun light wont bother much!
it should have a 3rd weel but i refused and just used a 5mm led and let it drag along the path since it was light weighted.



notes:
no no!!that chipset is just ornamental!dont be fooled ;)
at the buttom u might notice that its a cell phone cover!lol
for supply i packed 6x AAA cells and mounted it on the empty space at front which made it ugly so i removed it.
a buzzer added to make sound at specific situations and a button for PLAY/STOP
8 x leds show the states of sensors
____________________________________________________________________________________________________________
micro: ATMEGA8
sensors: 8X IR
motors: 2x mini motor gear
sound:buzzer
motor driver: L293
buffer(for sensors): 74245
____________________________________________________________________________________________________________
more info later
its a line follower
- Actuators / output devices: Buzzer, 2 x dc motors, 9 x led
- Control method: autonomous
- CPU: atMega8
- Power source: 6x AAA cells
- Programming language: Bascom-AVR
- Sensors / input devices: IR
- Target environment: indoor flat surfaces with ramps