



TheBox
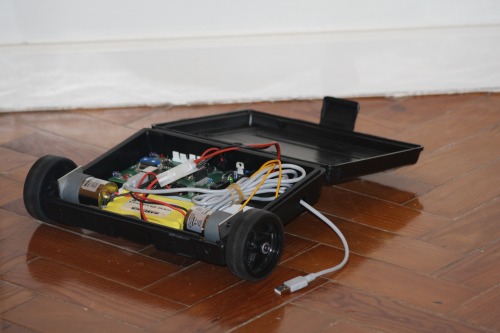
Well, this is probably the simplest robot I've ever made. It is just this event's robot mounted in a old IBM box.
I've built it just to serve as a testing platform for some processing applications that I've been developing lately.
It is simply programmed to read the letter (w,s,a,d,g) sent by the application running on the computer and to move according to it.

UPDATE - 21 MAR 2011:
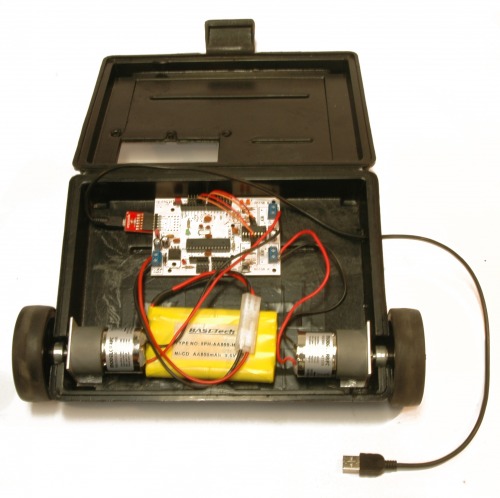
Some time after I made this robot, the board stopped working, and I have been all this time without doing anything on it. But, last week, when I received my two new motor driver boards, I decided to rebuild it:

It worked very well, but, then I had the possibility of trying the guibot's motoruino, which simplified a lot the robot, so it ended like this:
I made an instructable of it which you can find here: http://www.instructables.com/id/Make-a-simple-platform-and-give-mobility-to-your-c/.
I've submitted it for National Robotics Week Robot Contest and for the 3rd Epilog Challenge so, if you can, please vote on it here: http://www.instructables.com/contest/robot/?show=ENTRIES and here: http://www.instructables.com/contest/epilog3/?show=ENTRIES&sort=RECENT&limit=18&offset=54 Thank You! :)
Applications:
I've made a tutorial about this a while ago and how it is simply remote control I haven't posted a movie...
- Touro - The Bull (Color Tracking):
This is the one that I'm currently working on.
It detects the color specified on the sliders bellow and tracks it, how you can see on the movie.
I don't mind to write a tutorial about this matter, tell me if you want me to do it...
![]()
UPDATE: 8 OCT 10
- Motion Detector
This is a really simple application.
If it detects movement the robot shakes and says "Motion Detected!"
It uses the library TTS (Text to speak).

UPDATE: 13 OCT 10
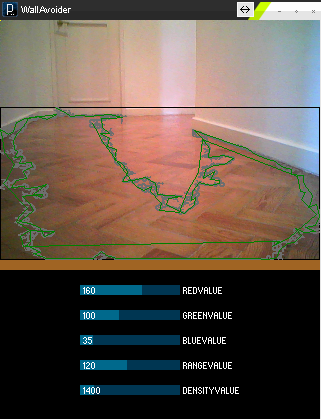
- Wall Avoider
This is another simple application.
If it doesn't detect the color of the floor it turns right.
UPDATE: 27 OCT 10
When I was watching the CtC's new video I noticed that I haven't updated this page for a while, so here are the new applications.
- ColorTracker V2
It does all that the V1 does but it is easier to use.
Now it has three lines, the yellow that represent the center of the blob, the two red ones that divide the imagem in three parts, if the yellow line is in the first it gives the robot an order to turn left, if it is on the second it the robot is told to go foward and if it is on the third part it should turn right. Those red lines can be ajusted by using the two correspondent sliders. The COM port can be defined using the text field.
![]()
- FaceTraker
It's very similiar to the ColorTracker but instead of colors it tracks faces.
When the pc is on a desk it detects easily human faces, but when it is on the robot the cam is very low, so it's easier to use a draw.
![]()
UPDATE: 28 OCT 10
- ColorTracker V3
It's another new version, does all that the V1 and V2 does but it now analyzes the y position of the blob.
So, if the blob is between the x min and x max lines and it's above the ymax it goes backward, if it's below it the robot goes foward.
The y max line can also be adjusted by using the slider on the right which is inverted for now.
It hasn't been tested yet with the robot, but I guess it should work just fine. :)
![]() .
.
UPDATE: 8 DEC 10
You can get more information about these to applications on this tutorial.
- WiiSerialController
I didn't work much on this, it is just the application MyFirstWii modified to send serial commands to the robot.
- FireTracker
This is a application that gets the coordinates of the four brightest ir emitters from the wiimote camera. Is it is connected to a robot it analyzes them and sends serial commands to it
![]()
Tests some processing applications
- Actuators / output devices: 2x Motors
- Control method: Serial
- CPU: Motoruino w/ ATmega 328
- Operating system: Windows
- Power source: 9.6 V
- Programming language: Arduino, Processing
- Sensors / input devices: Computer
- Target environment: indoor and outdoor