


The way we walk...
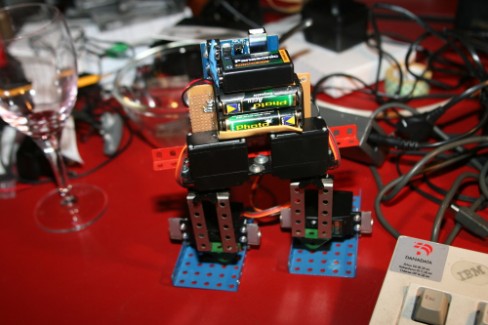
This is an attempt to build a walking biped with only 4 servos, since that's what I have left right now. Since I don't have any video recording equipment right now, I'll try to describe how it walks. It start by tilting left to put all the wight on the left foot and lift the right foot. This is done by turning the left foot servo to the left, while turning the right foot to the right to support the robot as far as possible in the tilt, like this:
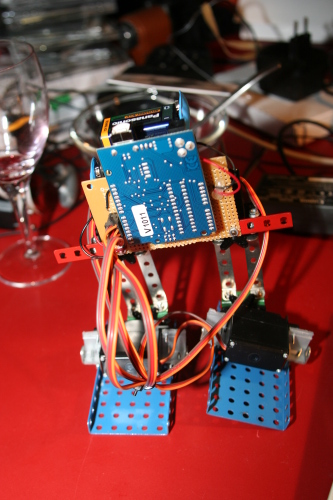
When the left servo turns further to the left, the weight will be on the left foot and the right leg will be lifted:
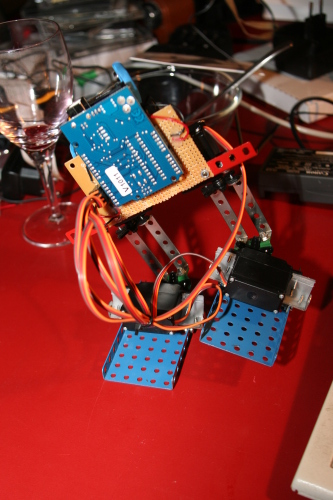
After the leg has been lifted, the robot will use the other two servos to move it forward. At this point, I always reach out for it, because it looks like it's going to fall:
Next step might be to add a gyro or acceleratometer, so it might adjust itself, if it's going to fall.
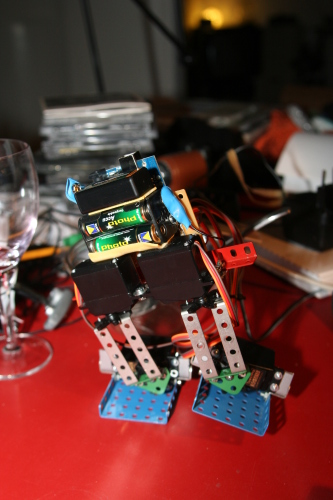
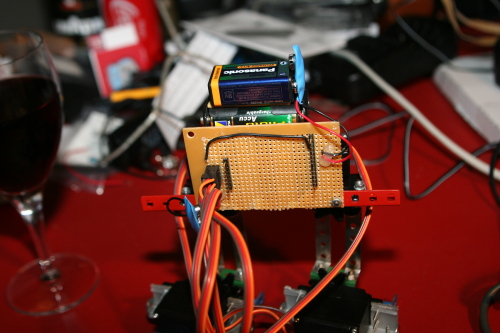
The "brain" is an Arduino that is mounted on a perf board. Only port 0-7 are connected because, the Arduino designers have, in their infinite wisdom placed the connector for port 8-13 half a unit from the 0-7 connector, so it won't fit on a standard perf board.
I'll add a video next week, when I get my hands on a camera that can record video (no, there is no camera in my phone and my webcam doesn't work)
UPDATE: Video available.
Walks straight ahead
- Actuators / output devices: 4 servos, TowerPro SG-5010
- CPU: Arduino
- Power source: 9V+6V
- Programming language: C
- Sensors / input devices: none
- Target environment: indoor