



The TTP Project

The TTP Project, hereafter just TTP, was designed to play Tic Tac Toe against a human in a very unconventional way in order to compete in Oddbot's Naughts and Crosses challenge. When he first posted the challenge, I thought it would be great to enter, but I couldnt thing of anyting unique, so I left it. But one afternoon, I was thinking of how it would be awesome to have a nunchuck/arduino controled potato cannon turret, then the idea morphed into a potato cannon turret that would somehow fire two colours of potatos at a # target. Quickly realizing that I do not have the resources to do this, and realizing that I would have to load a potato in every time caused this idea to go quickly down the drain. But I have a 200mw red laser, and I could pop baloons instead!!! finally the idea was beginning to take shape, I would have a turret mounted above a #, but each space would be devided into two, have an X and an O in it, and they would be covered with baloons. The robot would pop the baloon above the X or O to cause it to show. And, partially inspired by Oddbot's very own tic tac toe machine, the whole thing would take moves in from a TV remote.

I coded the program without using anyone else's lookup tables or the such, just a bunch of if/select case statements to cover every possible game if my bot moves first. This required I play a few games of tic tac toe with myself
TTP always goes first, always chooses the upper left hand corner, and wins 3 out of the 8 possible starting games, it ties the other ones,and it never loses. The first version of TTP was constructed of two servos, a laser, some plastic building toys (lego and K'nex) and a camera tripod. Bonnie (my biped robot) graciously donated her brains to the project. The second version had a K'nex board instead of a lego one when I found the water baloons I purchased were larger than the lego board would allow.

Close up of the laser turret.
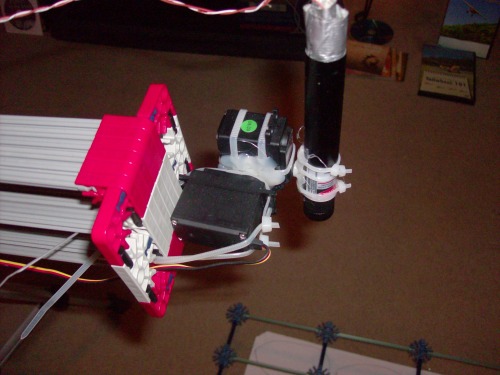
And a bit of a closer look at the tripod

Here is a picture of what it looked like when it was set up and ready to play on the K'nex board. You can see the lego board in the background.
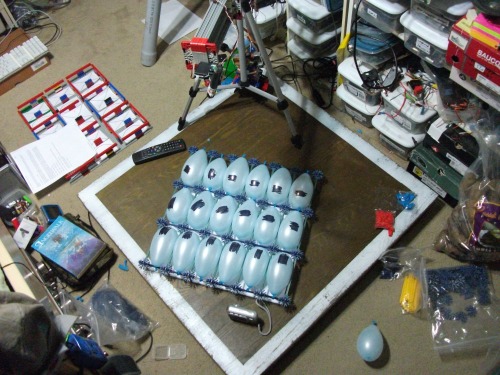
The black dots on the baloons are sharpie marks, as the laser does not have enough power to pop light coloured baloons consistantly enough.
TTP, which, by the way stands for Tic Tac Pop as well as The Ttp Project, suffered from a number of problems which caused it to never actually complete a game. In hindsight, it had sevral problems: there was too much uncertanty with both of the pieces (turret and board) moving around because they were not securly fastened down, I found my laser was not focused properly, and the corrdinates that I chose put the dot in the middle of the board, not the middle of the baloon, due to the angle of the laser beam. All of theese problems could have been overcome, but instead of trying to work with a mainly prototype bot, I decided to make a more finished version, and post it as well. TTP paved the way for my other robot to succeed where it had failed. You can see the new bot at: https://www.robotshop.com/letsmakerobots/node/36096
Plays Tic Tac Toe, Competes in Oddbot's Naughts and Crosses challenge
- Actuators / output devices: 2 Hitec servos, 200mw red laser
- Control method: Infared
- CPU: Picaxe 20X2 master, Picaxe 08M IR slave
- Power source: 3 cell 11.1v LIPO, Bench power supply while prototyping
- Programming language: Picaxe basic
- Sensors / input devices: panasonic PNA4602M, TV remote
- Target environment: Indoors sitting on the floor