



the Quadruped ! => with "drawer legs"
Hello everybody!
“First I must tell you that I am from Algeria, and I always posted my projects in a French web site Robot-Passion, so I apologies for my English I hope that you understand me well :D”
I am here to show you my first creation under construction in “Let’s make robot “
I posted already here some of my robot creation
Now I am here for a new thing … First, take a Look to the video (the comments are in French so I will translate you below)
1- 2 tubes of ointment 40g each one (very scientific method lol )
2- So we have 80g to lift.
3- To be continued.
Like you have seen the robot can climb obstacles it’s a thing that give me a desire to realize a quadruped robot coz am already thought why a must realize a robot on legs if a small mobile robot can move match well and will be less hard to realize ?!
2and thing The drawer leg!
It’s made with a broken CD reader I bought 4 for 4 legs for just 6 dollars: D

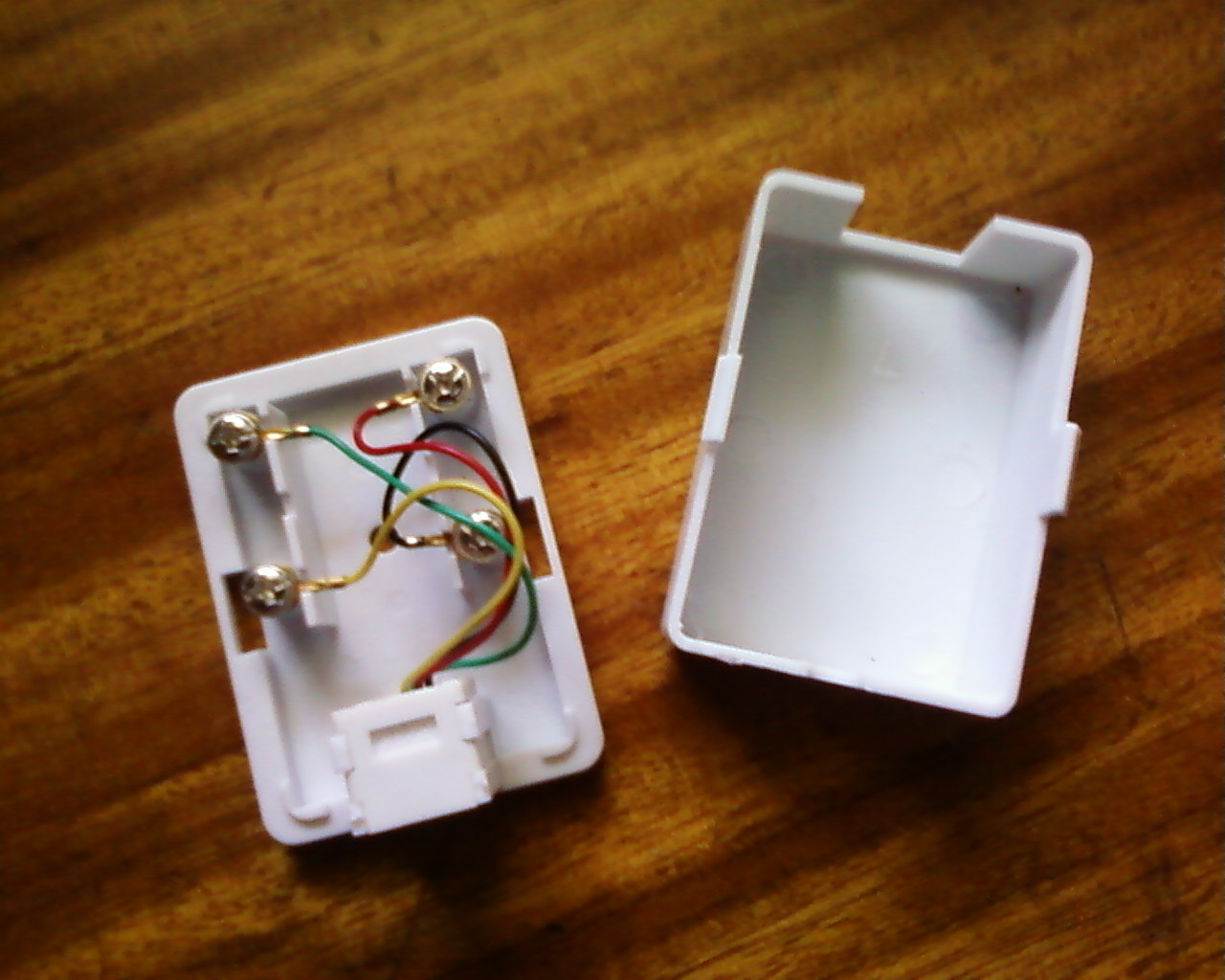
I used these small plastic boxes (of a telephonic outlet) for the mecanice system, and it works a well

The 2and thing that will move legs is will be a 4 servomotors (1 for each legs) like I am from Algeria :p there is no way to bought them, so Mr.Electron ( a member of robot-passion forum) will help me to bought it from France, so a big thanks to him !
Hello everybody! i have some news for you!
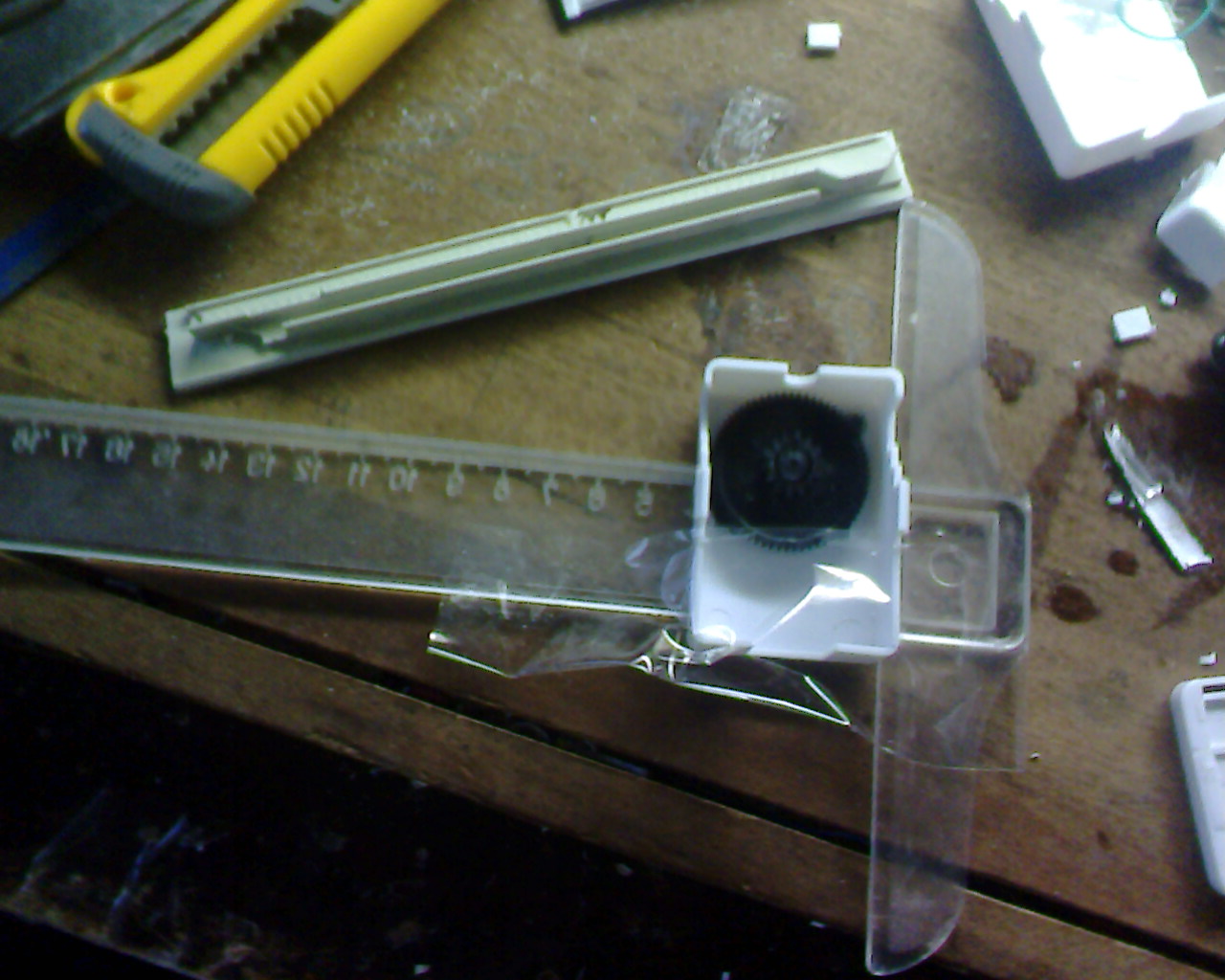
I did not still receive my 4 sermotor, but During this time I spent time in improved my "drawer legs", I looked for the means to know the position of my leg.
The solution widely answered is to used Optical sensor, but I wanted to avoid this solution due to the lack of place
The solution was to use a hall sensor, that we can find easily in brushless motor
like you can see whene the magnet passe behind hall Sensor we have 0v, so we can by thise way count number of tours do by the gear
To be continued…
...NO it will not continue! I just received the package was sent to me free by the Caliban Association ! , there is a lot of very useful thing, a big thank to them!
the package contains a lot of stepper motor and electronic component that its members offered me, the problem is that there are only 3 identical servomotors, so that my project requires 4 ......... that's why I must find a new project: /
BIG thanks to Caliban Association !
drawer legs to the trash! :'(
DAMN BE MY COUNTRY :D
Hello everybody I have some news!
I made a new video that talk about some little progression in my project (sorry it’s in French without translation, I did not wont make video with wrong translation).
Bat on large I talk about Caliban association that help me with component and servomotors also the 1st legs of my robot is finished and work perfectly
Voila !
Walk and climb obstacles
- Target environment: I hope …Anywhere!