


The G_Bot
Hi everyone.
I am a CNC Programmer Machinist and will probably make my own wheels.
Knowing me this Robot will look nothing like I expect it to look right now and will probably take much much longer to build than most of you because I am never happy with what I produce the first time round. For instance I will probably turn out 6 pairs of wheels before I am happy with it.
I am a CNC Programmer Machinist and will probably make my own wheels.
Knowing me this Robot will look nothing like I expect it to look right now and will probably take much much longer to build than most of you because I am never happy with what I produce the first time round. For instance I will probably turn out 6 pairs of wheels before I am happy with it.
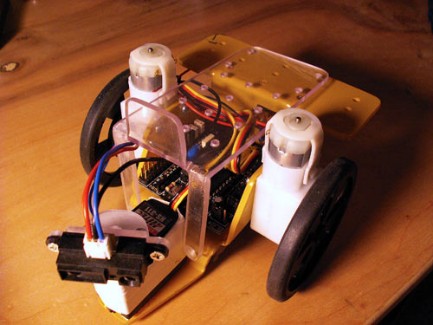
Runs around sees things and avoids them and perhaps makes some robot noises via a speaker
- Actuators / output devices: servo, IR Sensor, Tamiya Gearbox 114.7:1
- Control method: Picaxe 28x1
- CPU: Picaxe 28x1
- Operating system: Windows 7
- Power source: 4.5 volts (3aa cells)
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D12 IR sensor
- Target environment: indoors for now