


The Cardboard Cruiser
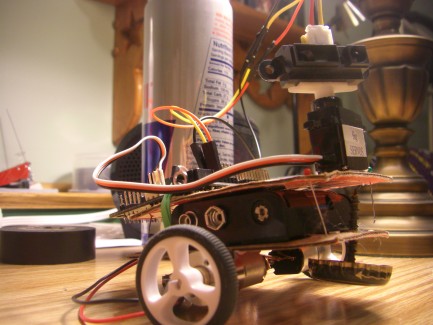
Hello fellow builders. Here is the robot I have been working on. I call him the cardboard cruiser. It's basically a start here bot with my own code. Not very exciting as it has been done before, but I am still getting familiar with everything. I wrote the code myself and am not entirely satisfied with it. All it does basically is drive slightly towards objects it sees untill it runs into them, then it drives towards the biggest openning and repeats.
Improvements I plan on making eventually
- Replace the cardboard chasis. I will probably choose plexiglass as the materials
- Replace the sensor. It seems like the sharp sensor is kind of finicky. Probably an ultrasonic unless I think of something else that hasn't been done so much on here.
- Add more stuff! I have a speaker I can mess around with. I want to add a flipper or grabber thingy so it can interact with stuff.
For future projects I really like the idea of hacking pre existing toys and putting my own brains in them. I think I might have some RC cars just waiting to be cannibalized. Keep an eye out!
Last thing: The video isn't coming out properly after I edit it, but you can at least kind of see what's going on. I'll try and get that working.
navigate using servo mounted sharp IR sensors
- Actuators / output devices: 2 motors, 1 Servo
- Control method: fully autonomous
- CPU: Picaxe 28x1
- Sensors / input devices: Sharp IR
- Target environment: indoor