



The black one
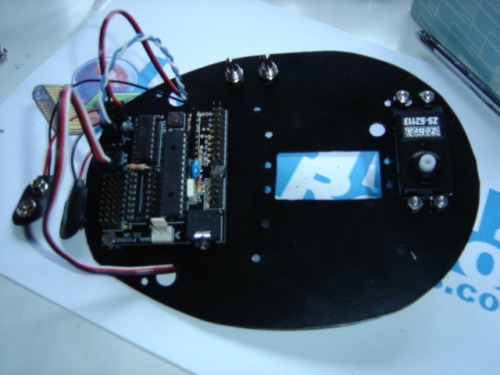
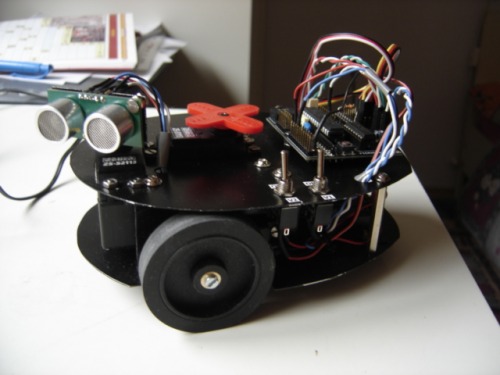
After seeing all this cool robots on LMR I build one my self. I used parts from an old computer, printer and old cassette recorder to fabricate the frame for it. For a while now I was looking for a simple yet powerful project bort to experiment with and picaxe 28X1 was perfect for my needs so I order it and put it to use right away. The robot is just driving around and avoiding obstacles at the moment using ultrasonic SRF05 sensor, but it has room for robotic arm at the top which is under construction and hopefully finished soon.
All the pieces used.

For the wheels I used two printer wheels which are normally used to draw paper in. I modified them so they can be screwed to the servo. The servos are at the moment driven by L293D chip, because the wires are soldered directly to servo motor. I will replace these two servos with two other and modify them for continuous rotation so I could control them with microcontroler. That will save me two output pins which I can use for the robotic arm or something else.

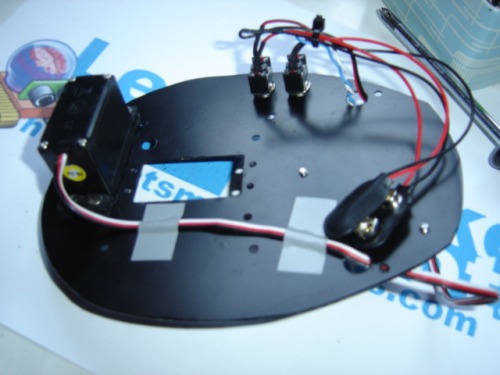
The rear wheel is from an old cassette recorder, it was used to guide the cassette strip over magnetic head.

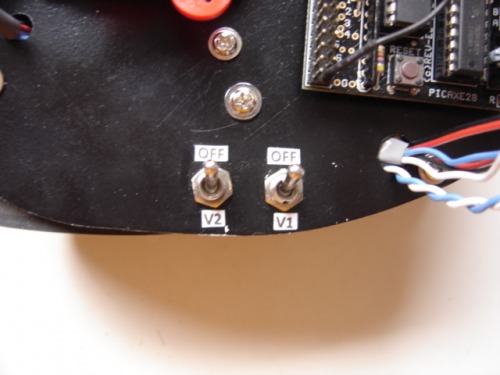
At the back I made room for two packs of 4xAA rechargeable batteries, one pack to drive servos and the other for microcontroler.

the body is build out of sheet metal and sprayed black.
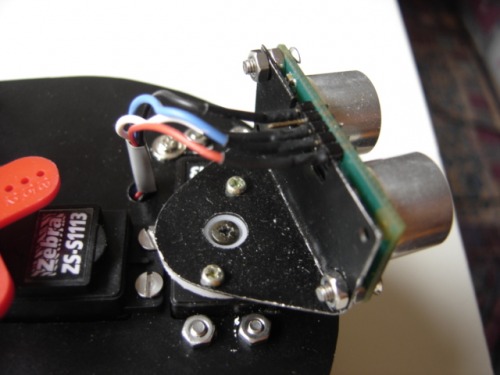
Bracket holding SRF05.
Navigate around via ultrasound
- Actuators / output devices: Servos
- Control method: autonomous
- CPU: Picaxe 28x1
- Sensors / input devices: SRF05