


Teslabot Wrist Mechanism Model
Video of my working model:
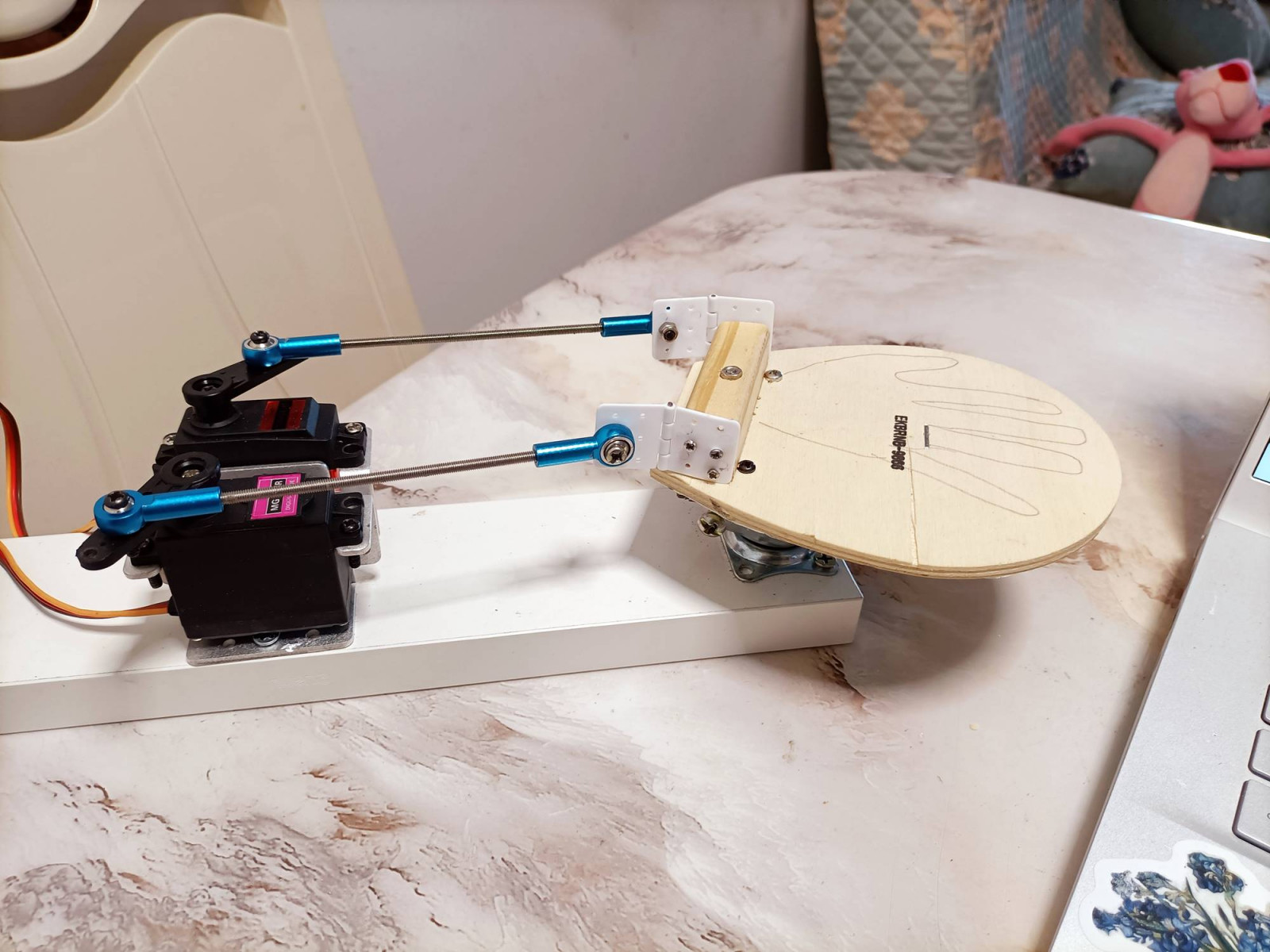
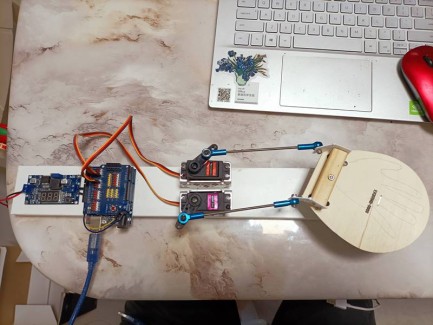
Above photo shows the hand (part of paddle) mounted on a gimble and connected to two servos by arms and rc aircraft hinges. When the servos both go forward, they push the hand down, when they both go back they pull the hand up and if the servos turn inverse to each other they turn the hand left or right. Simple compared to some really complex wrist mechanism I have see on other robots.
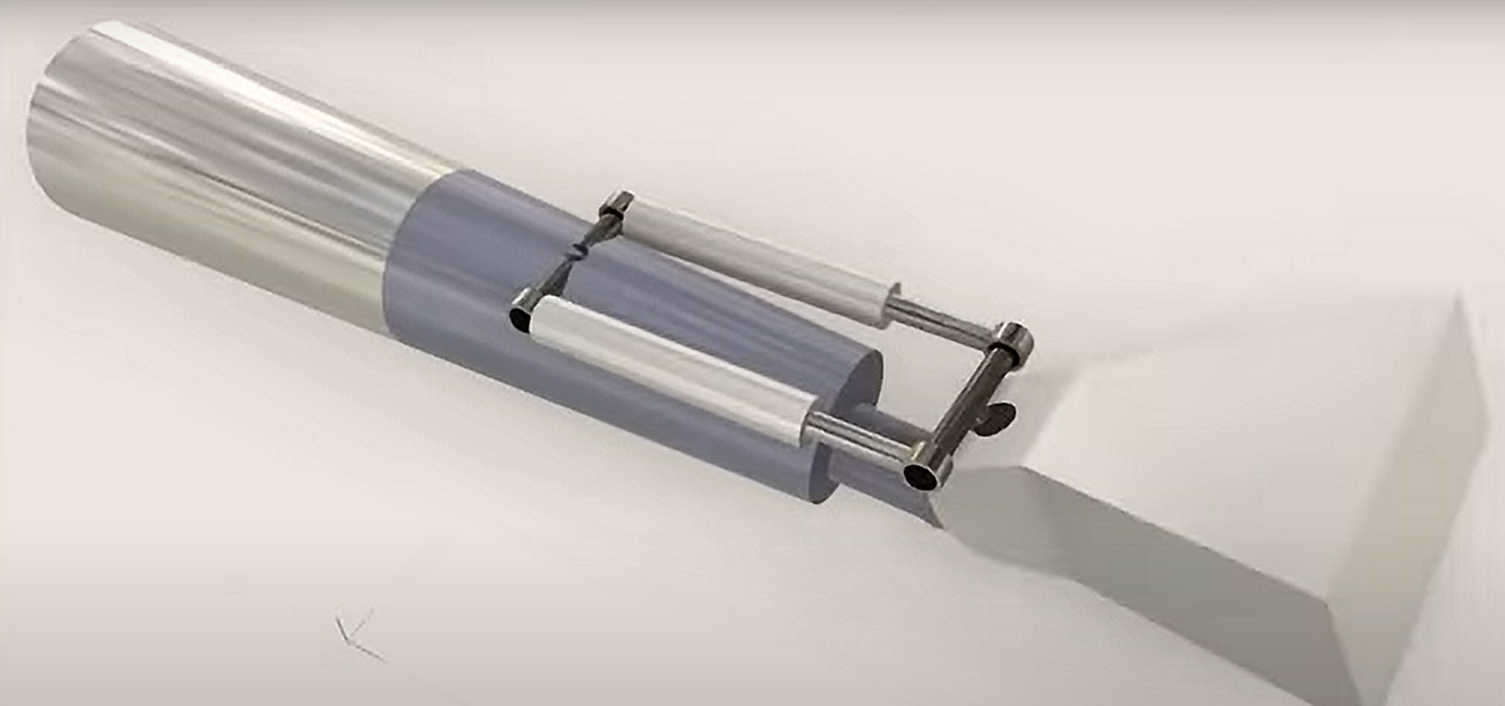
Above is Scott Walter's graphic model of the Teslabot wrist using two linear actuators.
The interview between Herbert Ong and Scott Walter on the Teslabot. Fascinating!
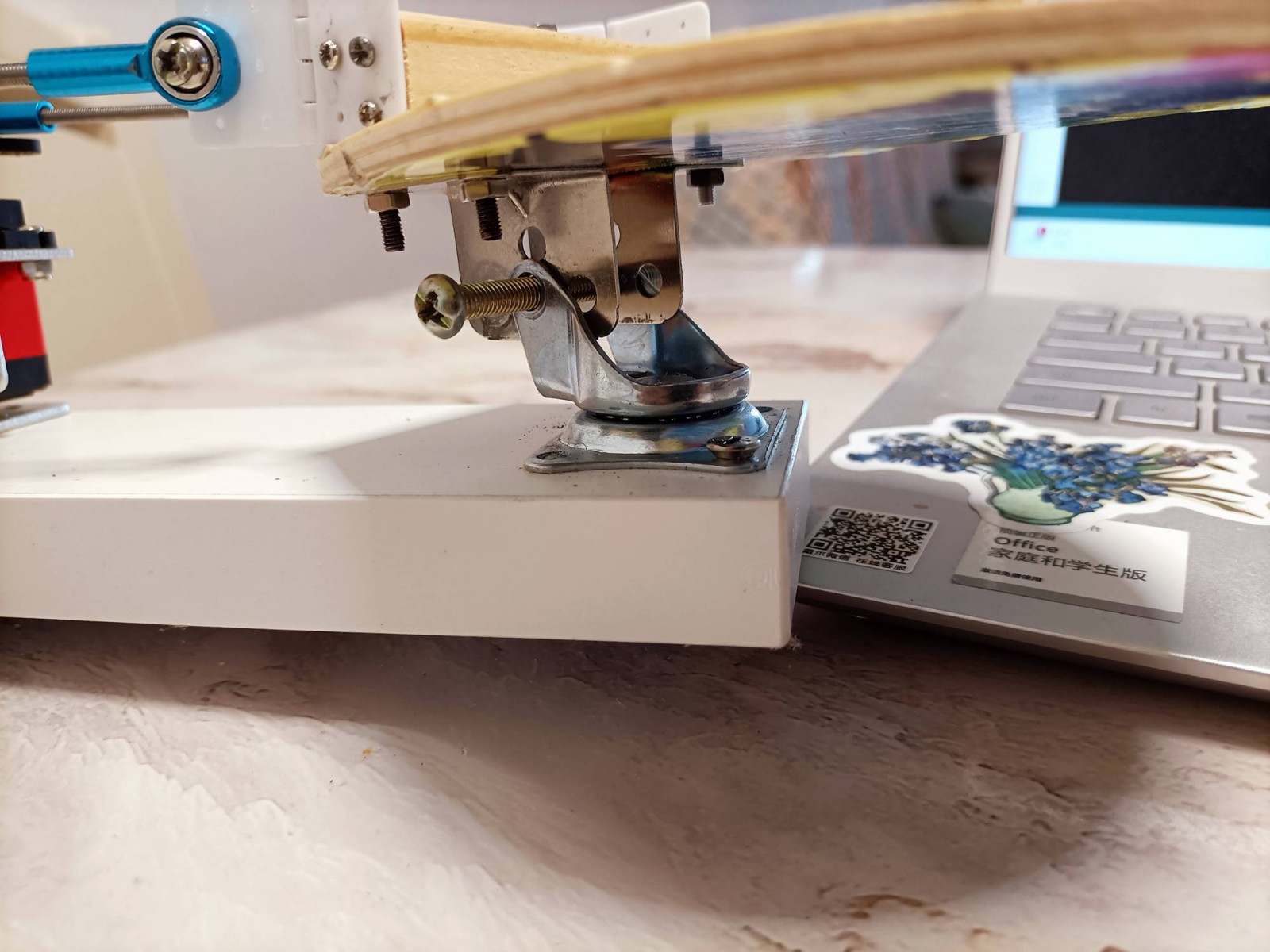
Above photo shows a gimbal I made from the chassis of a caster wheel and two angle brackets. Gives 2 DOF - pitch and yaw.
Thats all folks!