



Telepresence Robot (XMOS Challenge)
This is a Telepresence robot, it is intended to be connected to the Intenet (Wifi) and allow a remote person to interact with the (remote) environment. Whilst not in telepresence mode it will interact with people locally.
The project is based on the work of the leaf.org with some components from NASA's Claraty project.
High level functions, planning/mapping/video processing is done on a mini-ITX with cut down Linux (puppy) running software ported from the leaf project and Calarity.
Low level functions such as Physical interface management, gyro, servo, motor control and low level sensor fusion and filtering via XMOS processor(s) communitating to the mini-ITX via serial.
Power via two battery packs 1 x 12V NIMH for the logic and 2 x 6v NIMH for drive.
Drive is via 4 320 series motors using spur reduction boxs,
Steering using all four wheel, the principle challenge is that it is intended that this robot to be able to navigate stairs by alternatively balancing on the front and rear wheel sets, the geometery of the "leg"s may be altered to increase and decrease the height and move the CG over the wheels.

The above photo is the back bone of the robot, I am using the head off a Robot Quad, I contacted Wowee and they sold me the neck and head, I could not bring my self to hacking mine! The head will contain 1 x Gameboy Camera and one Wii remot IR Camera and the mic. The head will be mounted to allow yaw, pitch and roll for expression. The PC is running puppy linux with the the graphics removed (all the apps at this stage) and boots from flash. I have built a PC running a similar build except it boots from disk and has the GUI interface left in.
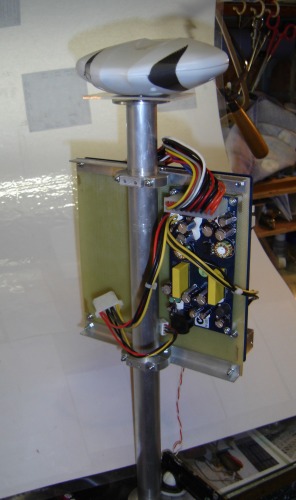
This is a view of the rear, the mini-ITX Board is mounted to a fiberglass sheet which is attached to the backbone using fokker clips, top hat shaped flanges are turned for the top and bottom mounting.

This is one of the wheels, they are Roller Blade wheels with and Alu hub fitted, RC car roller bearing with an RC car gear as the final drive, the wheel mount has a gearbox (18:1) to give approx 49:1. Motor control will be softstart & constant G. I think the Plastic gear will be ok, I am a little concerned about power especially when balancing the motors will bang back and forth a lot.
Act as a virtual person remotely, allowing a person on the Web to interact with others in an unstructured environment
- Control method: autonomous (very), Wifi connection to Internet
- CPU: XMOS processor(s) performing the low level motor control, pose control etc, mini-ITX PC running linux performing the higher level functions
- Operating system: Pupply Linux
- Power source: 4.5AH 12V NIMH for logic, 2 x 6V 2.5AH NIMH for drive
- Programming language: C++, C, XC, Lisp
- Sensors / input devices: Gameboy Camera, WII Remote IR Camera
- Target environment: indoors mainly