



Here's a video of the first walk test:
https://www.youtube.com/watch?v=GPNYANVoasM
I added a bluetooth module HC-05 on the Arduino Nano controller and made a simple Android app to control the robot. Here's a vídeo:
https://www.youtube.com/watch?v=W8AhiIj9Dz4
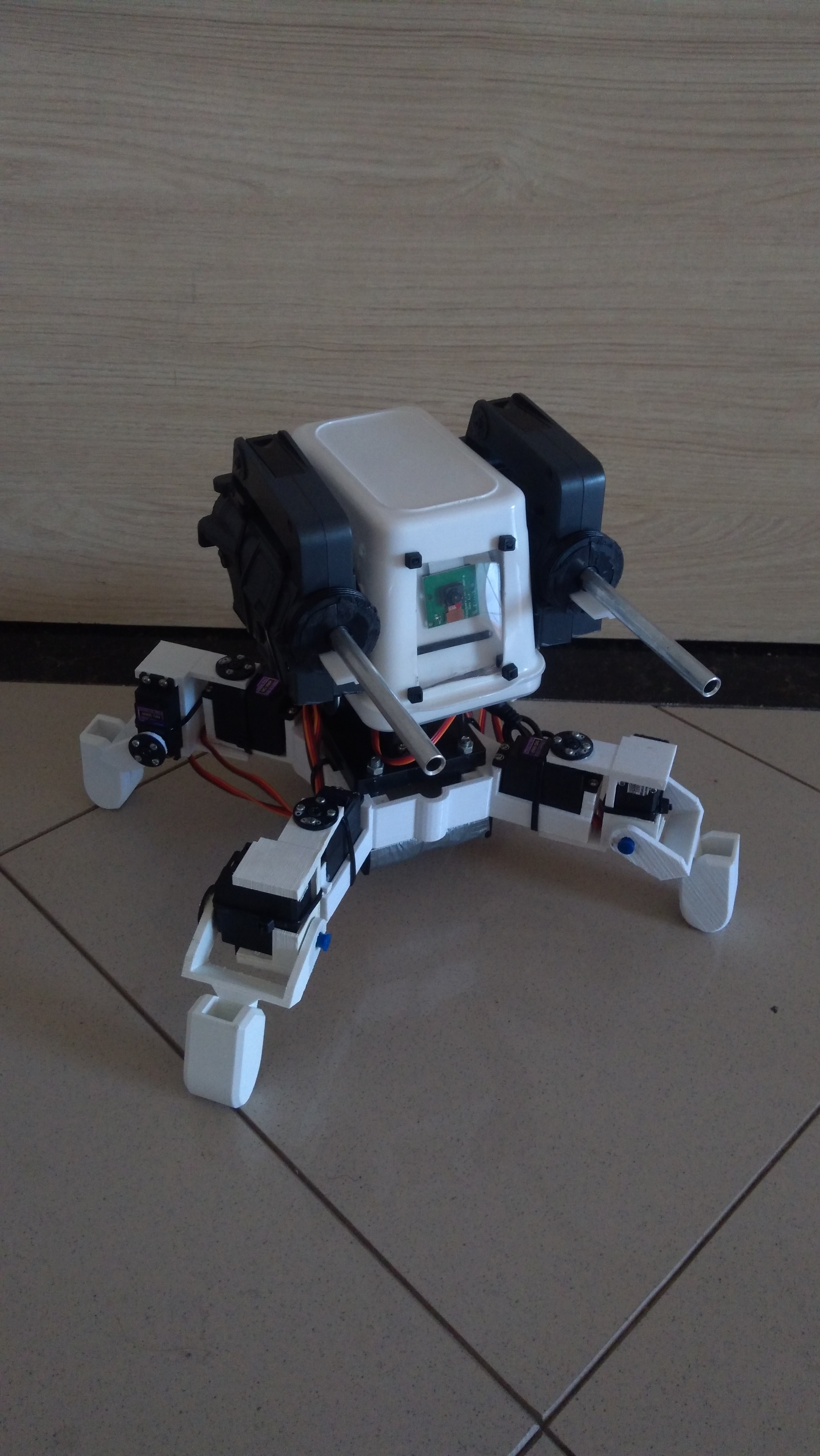
Proceeding with the project, I made a "head" ou of a Tupperware plastic container on a pan/til servo-driven mechanism. You will notice that it has a PiCamera on it, and also a Raspberry Pi 3B+ model. My goal is to program an automatic object track for the robot to aim by itself through computer vision (I'm actually advanced in this part, but I'ill share it later when it's completely done).

So I mounted the airsoft guns on the robot's "head" and tested it.
Here's a video of Teiu shooting:
So here's the first developments in auto-aiming (or aiming assistant) system: