



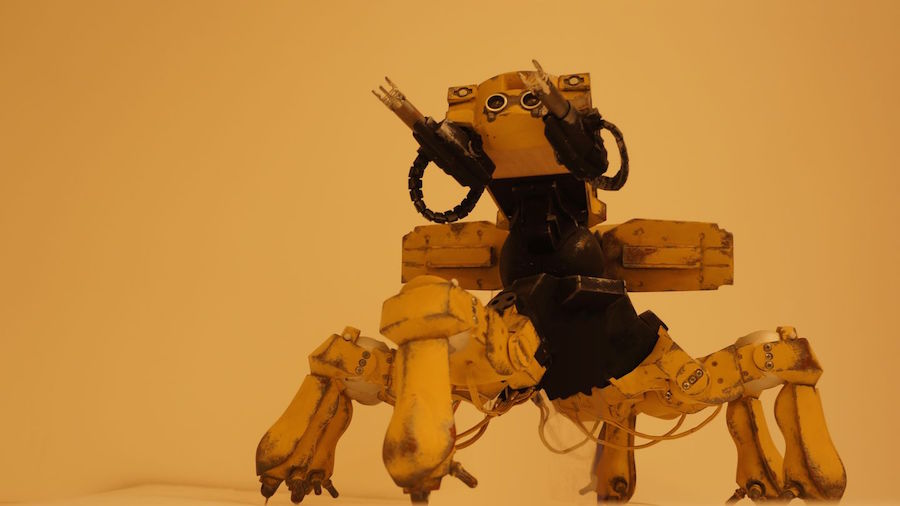
T08A2 hexapod tank (from Ghost In The Shell)
Ghost In The Shell movie left a long lasting impression on me. The tank from the final battle captivated my mind. It has such a rigid shape, but then moves in a very fluid way which makes it seem more like an animal, and then it becomes completely static making it purely mechanical again. Now I realise that this was something that I wanted to build for a long time and I just had to get it out of my system :)
https://vimeo.com/168164892
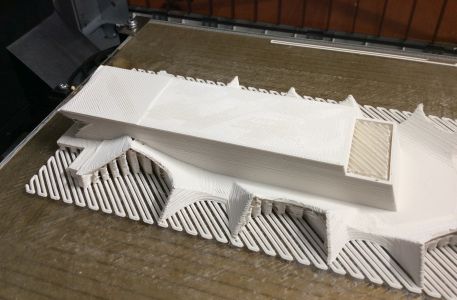
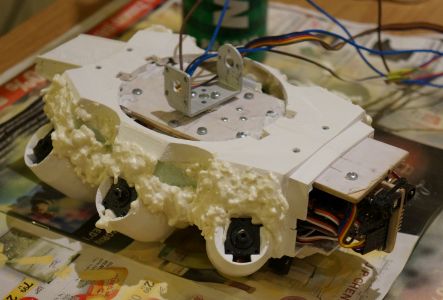
It took roughly ~250 hours of 3D printing time... and probably even more time for polishing using acetone, sand paper, files and putty. It is actuated by 28 servos and driven by 2 Raspberry Pi micro controllers with custom software for locomotion and animation. It has two lasers (serious, how can you have a robot with lazors?!!!:) It can be controlled by PS3 joystick, but it has some autonomy as well - it can track and follow faces.
Photos


You can find more photos, videos and info at http://gits-tank.com
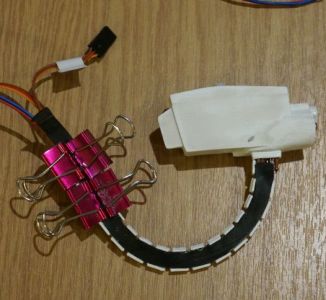
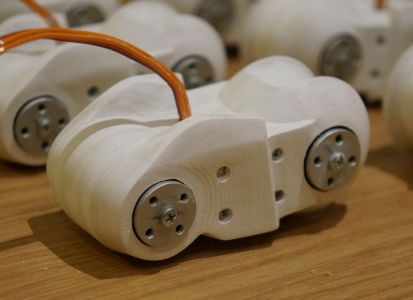
Story (behind the scenes)
A collection of random photos from making of:









If anyone is interested there is a full story about making of the robot here: http://gits-tank.com/Story.php
Specs

Hardware
- 2x Raspberry Pi micro computers (1st for motion control, 2nd for face tracking)
- 28x Servos (18 for legs, 4 for body, 6 for weapons)
- 1x Camera (for face tracking)
- 3x Servo drivers
- 2x Lasers (how can you have a robot without lazors??!!! :))
- 1x Distance sensor
- 1x PS3 controller (or XBox controller when developing on Windows)
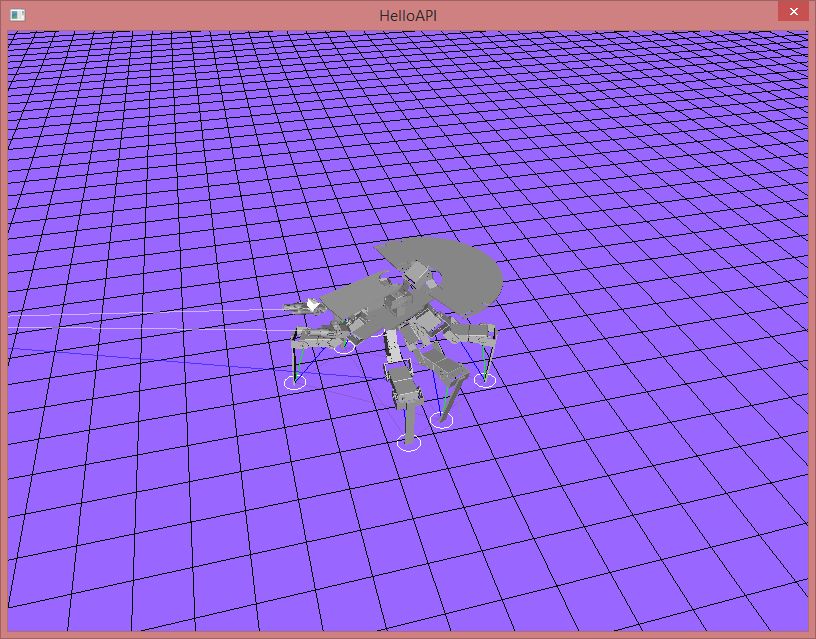
Software
- Custom engine with special gait algorithm, animation playback, IK, face tracking, etc.
- Unity pipeline for converting animations and skeleton from 3D animation software into custom format.
Moves in like no hexapod has moved before :)
- Actuators / output devices: 28 servos
- Control method: Bluetooth
- Operating system: Raspbian
- Power source: 7.5V
- Programming language: C++, C#
- Sensors / input devices: Ultra Sound, Raspberry Pi camera