


T - 3
Forgive me LMR for I hath sinned. I have exchanged good design procedures for copious amounts of hot glue...but the result was my T-3! IK on my I.M.P. project where not going as well as I wanted....so I needed a quick project to get my mind off it.
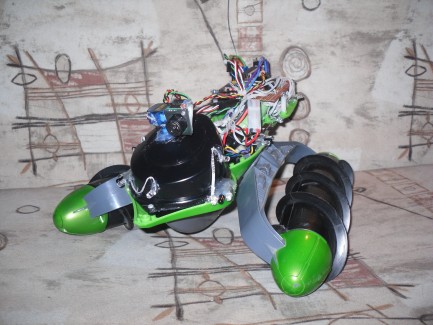
I dropped by a Value Village and found an RC Toy - Tyco Terrain Twister for $4.99. So I took her home with me for some good time ;) There was some water damage, the RC functionality didn't work and one of the motors was broken. Most of this was fixed with a contact cleaner and a BBQ scrub pad to remove the shorts. I had to re-solder 1 or 2 wires, replace the battery and clean the broken motor (turned out to be rusted), nothing too major. But now I had a convenient robot base!
I cracked open the control box for this thing and using my handy-dandy oscilloscope figured out the H-bridge connections and RC com port. I ran wires from them and designed a board in LochMaster. The board has 4 op-amps for my home-built IR sensors, a piezo, shift register and other standard DIP components. All the wiring is stolen from an old computer. The only expensive things on this are the Boarduino $20 and Ultrasound sensor $30.
The Boarduino will monitor the com port on the RC board and if it detects that the remote control is off will go into autonomous mode. The point is just to get this thing to drive on snow and hopefully eventually water. The code for it is not written yet. I have only written small snippets to test that all components work, and they do...so far. Now comes the task of writing a program that puts all this together. I welcome any suggestion! 
This is what she looked like when I got her. 
That motor ain't going anywhere. 
Trying to figure out what does what and how much of it. 
Hacking and wiring the RC board. 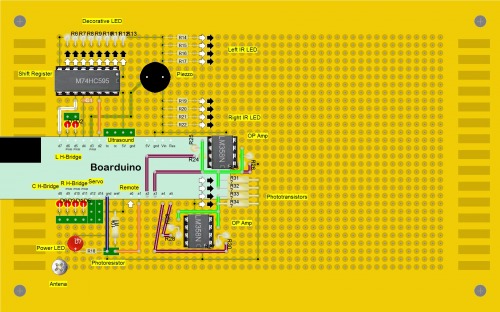
Top of board I designed (some small changes where made once I actually put it together).

Bottom of board I designed (some small changes where made once I actually put it together).
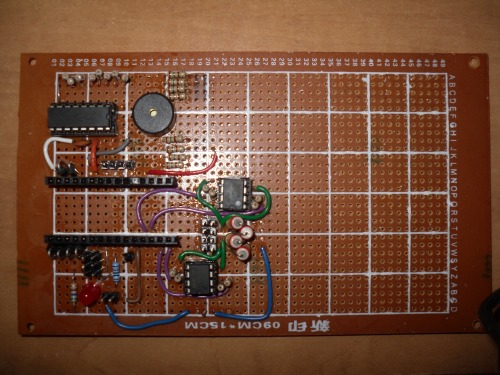
Board Assembled.

Checking if this thing works.

All electrical and mechanical work done, only coding remains.
Programming with TTL-serial cable.
*Updates to come;
I will update this thread with video and code once all that is done - hopefully before new years. I decided to post this to see what you guys think and to listen to any suggestions you have for me!
Drives around multiple environments
- Actuators / output devices: 3 Motors, 2 Micro-servos
- Control method: autonomous, RC
- CPU: Boarduino
- Operating system: Arduino
- Power source: One 9V battery, 7.4 V 3800Mah Ni-Cad
- Programming language: Arduino
- Sensors / input devices: srf02, Homemade IR sensors, RC controller
- Target environment: Water, snow, Sand