


Sumobot
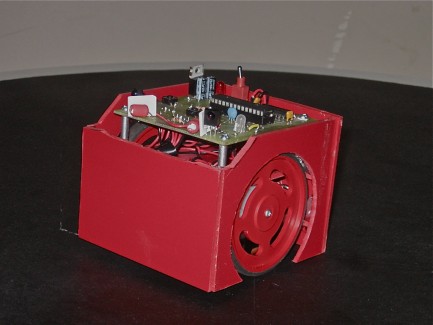
My second scratch built robot. I wanted to try and build a functional sumobot and this is what I came up with. Its not the most complicated or finally engineered robot but more of a proof of concept. It uses a PIC18f252 on a custom home made double sided pcb board.
I got a little ambitious with this project and actually planned it all on Eagle and then built it without breadboarding anything. I don't recommend this process as I had some hiccups as I tried turning it on for the first time.
The first time it up none of the sensors worked. After much head scratching and even more swearing I finally figured out that my motors were to noisy. I solder a couple caps across the leads of the motors and problem 1 was solved, except the sensors were still acting wierd. Lots of troubleshooting later and I finally have most things working with some really basic code and strategy.
So everything in the end worked out and I got it all working, but there are some improvements I would make next time, for example:
- The GM2s have lots of torque but aren't very fast, next time faster motors
- Having some line sensors on the back would be nice to know when it's getting pushed out of the ring
- More PNA4602s or maybe a different opponent detection method
- More batteries to the motors for overall power
- Better body design, maybe lower or a wedge design
- More modular and easier to disassemble to service and such
After all was said and done I have to chalk this one as a success and a good learning experience, now its on to bigger and better designs. Here's some more pictures.



Pushes Opponent out of the ring
- Actuators / output devices: 2 GM2 224:1 Offset Motors
- CPU: PIC18f252
- Power source: 4 AA batteries
- Programming language: Picbasic Pro
- Sensors / input devices: QRD1114 floor sensors, PNA4602 as bump sensors