



SUMBA - a sumo robot and my first project
Hi everybody, as some people allready know i am new to LMR and robots all together, meaning this is my first robot.
It was originally going to be a holiday project but when my science teacher gave us a holiday assignment that had rather open criteria, the bot for fun got given 4 weeks to be finished, so now with a bit over 2 weeks left I almost have the entire bot assembeled.
The chasses dimensions are 15cm wide X 15cm long X 5cm high


At the moment all i have is the unfinished chasse asembled (I still need to add holes for the wheels and skrew down the motor), and the code that i believe is finished, it may need some editing once i hook up the senors and test the whole thing out.
here is a fritz of the wiring it will be more compact when actually put together, those are 1K resistors.
here 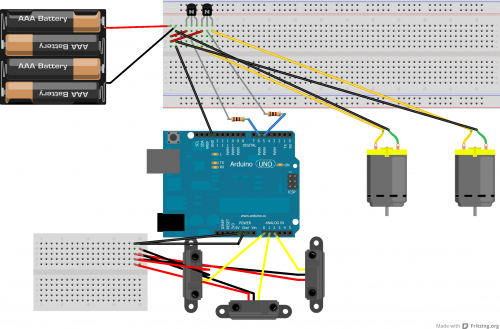
also with the code im using PWM to control the motors because I have an NPN transistor between the motors and the batterys and i dont want to burn out the motors.
Here is the code:
(EDITED CODE) changed after seeing the comment by bdk6
CHANGE LOG: when one motor is running the other is set to off
#define RIGHTDC 5
#define LEFTDC 6
#define MIDDLEIR A0
#define LEFTIR A1
#define RIGHTIR A2
#define DANGER 1000
#define HALFSPEED 127
#define STOP 0
void setup() {
pinMode(RIGHTDC, OUTPUT);
pinMode(LEFTDC, OUTPUT);
}
void loop() {
if (analogRead(MIDDLEIR) < DANGER) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if (analogRead(RIGHTIR) < DANGER) {
analogWrite (LEFTDC, HALFSPEED);
analogWrite (RIGHTDC, STOP);
} else if (analogRead(LEFTIR) < DANGER) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, STOP);
} else if ((analogRead(LEFTIR) < DANGER) &&
(analogRead(MIDDLEIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if ((analogRead(RIGHTIR) < DANGER) &&
(analogRead(MIDDLEIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if ((analogRead(LEFTIR) < DANGER) &&
(analogRead(MIDDLEIR) < DANGER) &&
(analogRead(RIGHTIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if ((analogRead(LEFTIR) < DANGER) &&
(analogRead(RIGHTIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else {
analogWrite(LEFTDC, STOP);
analogWrite(RIGHTDC, HALFSPEED);
}
}
(OLD CODE)
#define RIGHTDC 5
#define LEFTDC 6
#define MIDDLEIR A0
#define LEFTIR A1
#define RIGHTIR A2
#define DANGER 1000
#define HALFSPEED 127
void setup() {
pinMode(RIGHTDC, OUTPUT);
pinMode(LEFTDC, OUTPUT);
}
void loop() {
if (analogRead(MIDDLEIR) < DANGER) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if (analogRead(RIGHTIR) < DANGER) {
analogWrite (LEFTDC, HALFSPEED);
} else if (analogRead(LEFTIR) < DANGER) {
analogWrite(RIGHTDC, HALFSPEED);
} else if ((analogRead(LEFTIR) < DANGER) &&
(analogRead(MIDDLEIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if ((analogRead(RIGHTIR) < DANGER) &&
(analogRead(MIDDLEIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if ((analogRead(LEFTIR) < DANGER) &&
(analogRead(MIDDLEIR) < DANGER) &&
(analogRead(RIGHTIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else if ((analogRead(LEFTIR) < DANGER) &&
(analogRead(RIGHTIR) < DANGER)) {
analogWrite(RIGHTDC, HALFSPEED);
analogWrite(LEFTDC, HALFSPEED);
} else {
analogWrite(LEFTDC, 0);
}
}
If you see anything that you think i could improve on please tell me, as i said i am a beginner and i would love any help that can be supplyed to me.
(MAJOR EDIT!!!)
i haven't updated this in a while so here is what has happened with my bot.
First off, the gear box that i was going to use had shafts that were 3 ml in diameter and they did not fit my wheels, so i looked for new wheels and coudnt find any to the right size so instead i got new motors, this leads to my next problem.
i looked for the motor on the website of the place that my sister works at and got her to buy them for me, i stuffed up and didnt look at the dimensions and i got motors that were much larger than i originally thought.
to combat this problen i got rid of three walls and the roof to make room for the new motors and battery pack.
i also edited the front of the bot so that the sensors had somewere to be placed seeing as they were originally going to be attatched to the roof.
finally, when i was about to finish the robot i found the the cable ties i had bought to hold the motors down weren't long enough.
by tommorow i should have the robot done and be ironing out the bugs so expect videos and pictures soon.
there will also be updated code as i do not need to use PWM any more
pushes other bots out of the arena
- Actuators / output devices: 2 3 volt dc motors attatched to a dual gearbox
- Control method: autonomous
- CPU: Arduino Uno R3
- Power source: 9 volt battery for the arduino, 4 AA batterys for the motors
- Programming language: Arduino
- Sensors / input devices: sharp GP2Y0A21YK infrared sensor
- Target environment: inside on a sumo bot ring