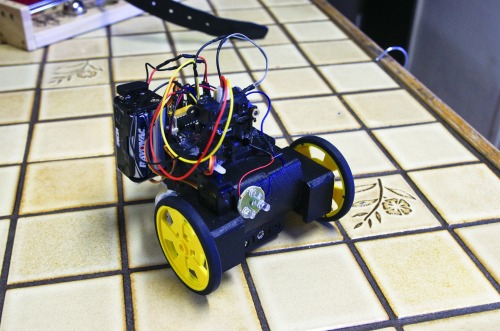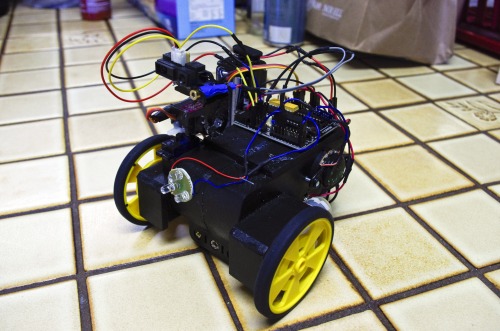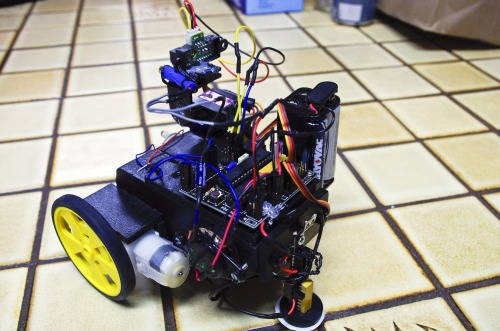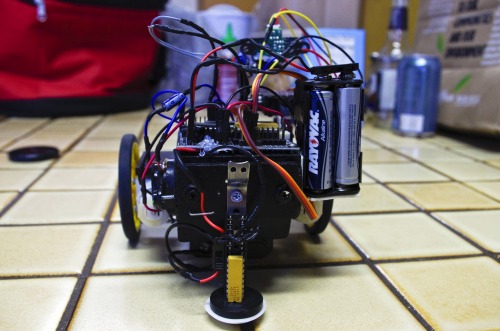
"Start Here" 2.0
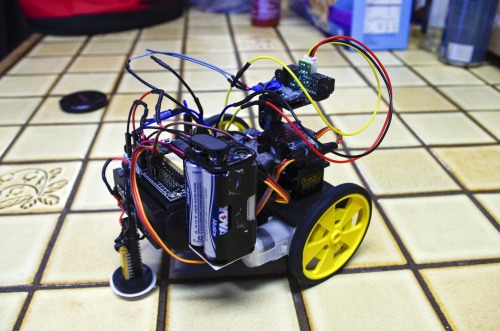
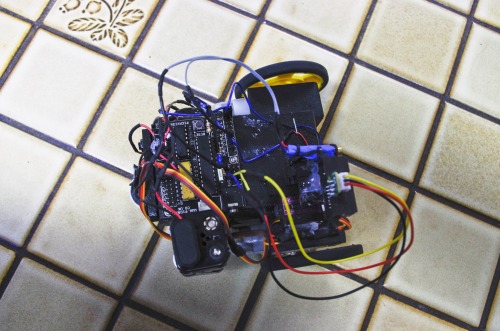
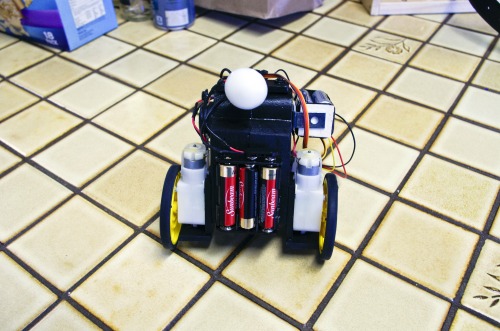
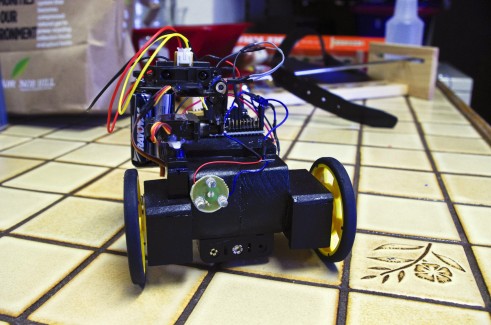
Slightly modified "Start Here" bot. Non-cosmetic differences include laser pointer attached near sensor, and a 2 DOF neck which gives it a rudimentary edge detection. The sweeping motion is to try and keep it from driving tangent to an obstacle or ledge and falling off that way. Works fairly well. Headlight for fun. Also, a speaker is attached and plays sounds based on the IR sensor input. The higher the sound, the closer an obstacle. You can tell which way it'll turn if you listen closely, as it always turns towards the more "clear" path when stopped - and thus turns in the direction of the lower sound. Finally, a 6V secondary power source was added.