



Sr.M Maze solving robot
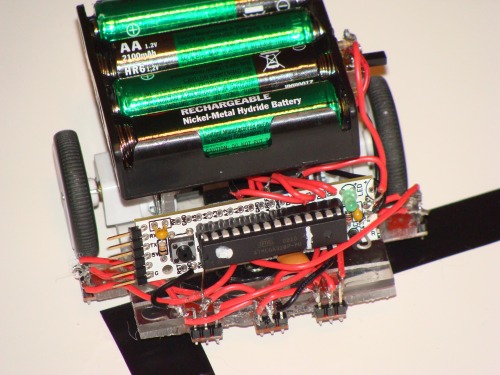
This is my maze solving robot. It uses a Arduino RBBB from wulfden.org. It has 2 30:1 micro gear motors.
The robot has 5 reflectance sensors for sensing the line. Its 3 in front are for following and staying on the line. It does this by slowing down a certain motor depending on which way the robot has come off the line. The 2 sensors near the back of the robot on the left and right sides are for sensing the turns in the maze. The maze has many different intersections and it knows what to do at all of them.
This is done using the left hand on the wall technique. This means that if it can turn left then it turns left, else if it can go straight it goes straight, else if it can turn right then it turns right and finally if it cant do any of those then it is at a dead end and turns around. Here is a great pdf. that explains that http://www.pololu.com/file/0J195/line-maze-algorithm.pdf
Thing left to do:
I have seen the 3pi robot a lot in videos and this is why i decided to build it. The 3pi goes back and refines the path and goes down the quickest and shortest path without the unneeded turns and dead ends. I got to thinking "i can do that!" so a few months later and only 2 days of building im at where i am. I have seen some people not do this awesome step with their maze robots but i want to. I have it using the left hand on the wall, well so what. I am working on the refining code, the cool part. It doesnt work YET but it will... it will. Give me a few more days and hopefully i will get it to work, if not give me more time.
Photo time:
.

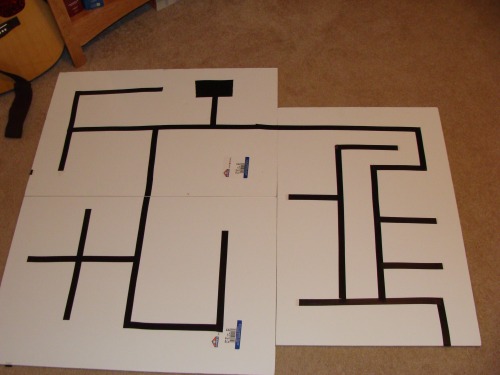
solves line mazes
- Actuators / output devices: 2 30:1 micro gear motors
- Control method: autonomous
- CPU: Arduino RBBB
- Power source: 4.8VDC battery pack
- Programming language: Arduino
- Sensors / input devices: 5 reflectance sensors
- Target environment: mazes