


Squidge
I had a Picaxe28 board lying around that i hadn't used and had been wanting to do something similar to the LMR start here bot for awhile now because it seemed to be a great starting point for using Picaxe's, so i decided to make a small bot based on that.
I made a little compact bot design with small pololu motors and included some Leds and Bi Leds to flash and change color dependant on the IR sensor input. I modified the code to include some Leds and different bot movements from the original code.
After stuffing around with Arduino's alot i can see why Pic Basic is basic but still great fun..
*Other things i would like to do and add if i get time: An IR remote control, Line following, speaker with different sounds..
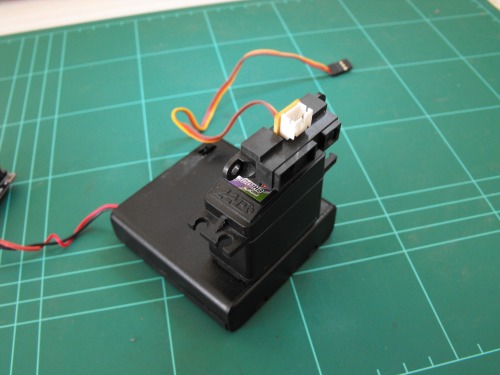
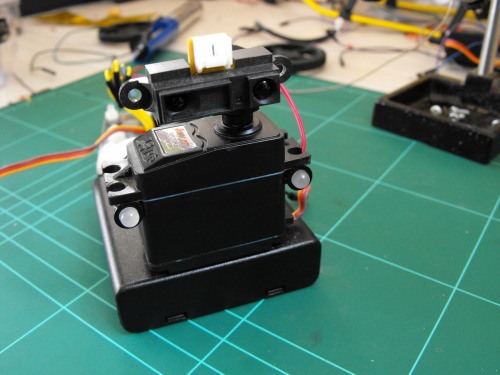
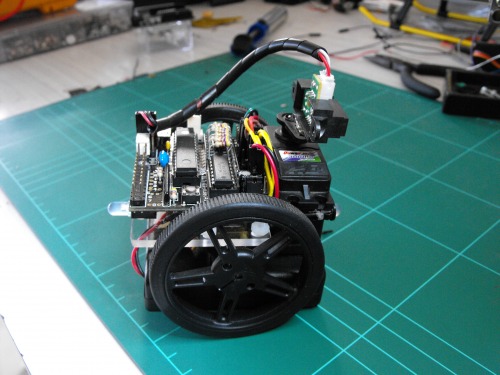
Servo hot glued to battery holder with a inbuilt on/off switch
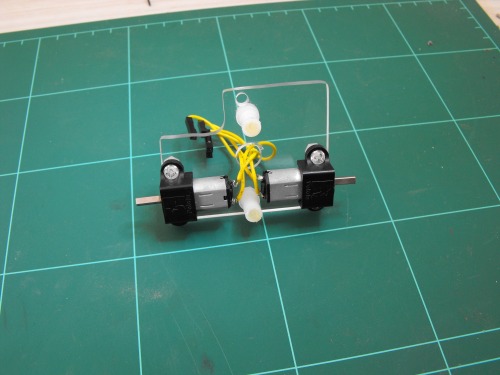
Geared pololu motors mounted on clear frame.
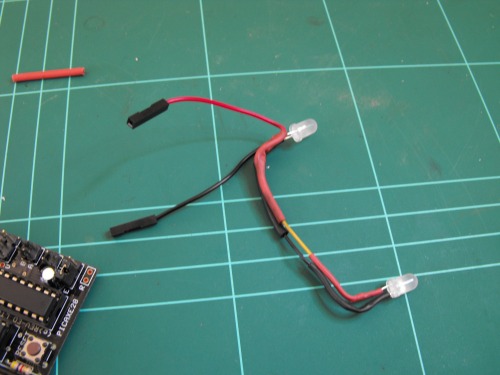
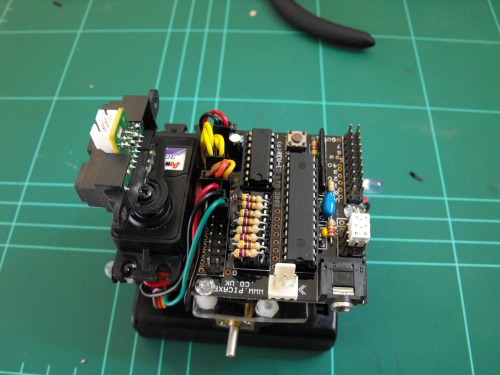
Decided to add some Bi Colored Leds that glow green or red. it will show red if the Sharp picks up an object or green when it moves around autonomously.
Front Leds look like headlights.
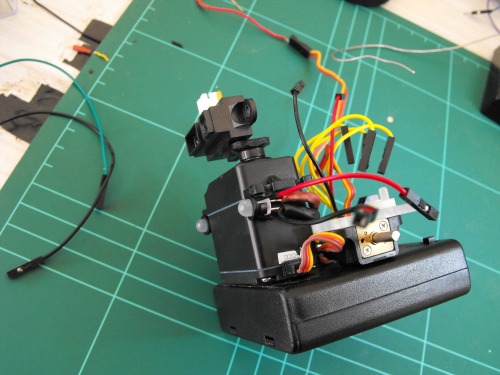
Motor frame mounted on battery case.. I love Hot glue!.
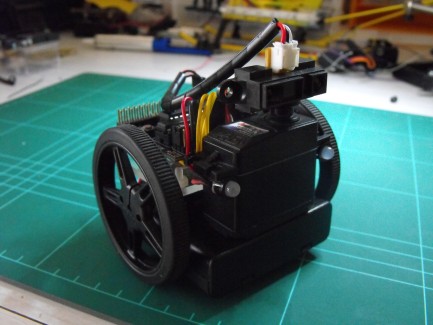
Everything squashed on and fitted snug.
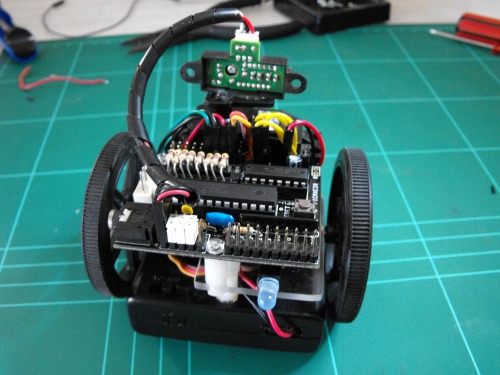
Time to add some wheels to this HotBotRod..
Wired and ready to go.
navigates around house via IR sensor
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 6v AA
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: indoor