


SPYRO SpoonTail
Guys this is my(our viz. me and my cousin) second robot based on Oddbot's Quadbot. Must firstly thank DAGU & robotshop.com for providing me all the materials required.
I have to esspecially thank Ignoblegnome and Oddbot for helping me out on this project.
The more I researched the better the robot became. Arduino is really very different from picaxe, so many differences , so many new features and the processing tool makes it a winner when there is a PC to Spider connection.
The development of the robot started on 20th April 2011. Had to tackle one problem after another.
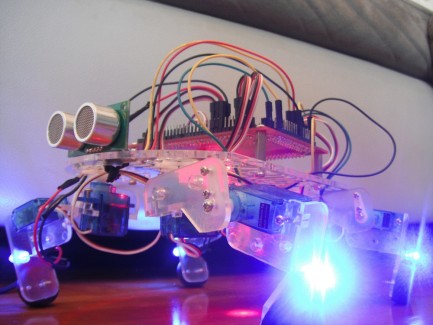
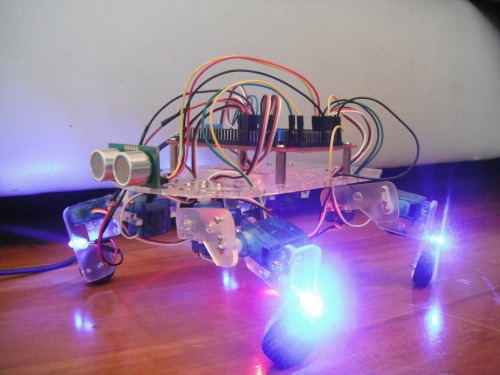
The name SPYRO $ilver £ye was given by my cousin,because of its 4 legs and the SRF05 "eyes". And I liked that name so I kept it.
First challenge was the assembly (the servo alignment was the trickiest part).



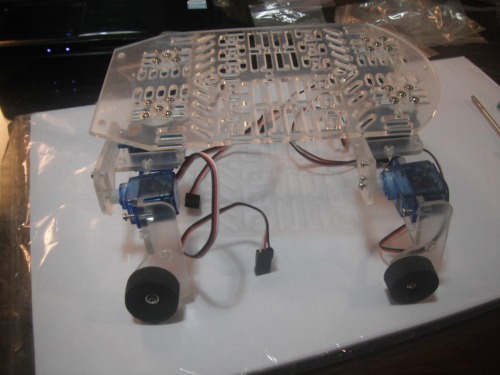
So I got the chassis then was the connecting part.
Which was quite simple after closely examing some other pics of Spider controller in action.
The programming part was quite challenging but finnally got the knack of it.
Then came the problem of connecting a SRF05 to the board, it was the first time I was using the spider board, a SRF05 and Arduino programming software.After troubling so many people with my queries on the same, I finally got it done.
Here is a guide I made just in case you need it.
Finally ended up with this (lot more upgrades to come don't worry! ):
The sensor program worked pretty well so did the entire autonomous program. But I just can't seem to be able to power the whole thing via batteries alone. I tried 6x1.5V AA batteries & 8x1.2V AAA batteries but in vain. When ever I do connect the batteries the bot moves a few steps then resets by itself :(
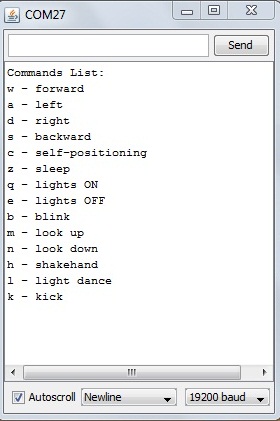
So for now the program I am using is using an interface between the PC and the Spider via a Serial Monitor. Here is a snapshot of the command list ( using switch..case commands) which I used in the video.
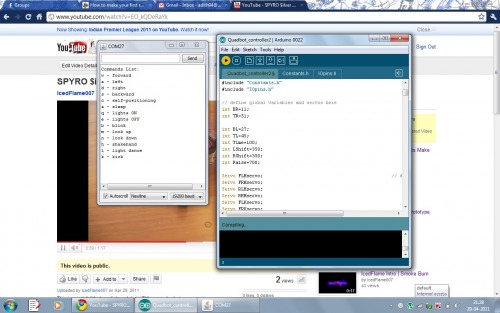
An autonomous version is around the corner. Just wait, but till then keep giving me advices guys :) and do help me making it autonomous.
"The more you know, the more you realize you know nothing"
- Actuators / output devices: 8x DAGU micro servos
- CPU: Dagu SPIDER (Arduino Mega Clone).
- Operating system: Windows
- Power source: USB power for Arduino
- Programming language: Arduino
- Sensors / input devices: SRF05
- Target environment: indoor