



SprintBot
Hi all, new to the group. Here's my first robot project ever - "SprintBot"
I do laser engraving and cutting as a business, so the chassis of the bot was fairly straight forward for me. I found the original idea and drawings here http://www.instructables.com/id/How-to-Make-an-OAWR-Obstacle-Avoiding-Walking-Rob/?newComment=true#comments and redid them to suit my needs.
As of tonight it walks and the servo points and the Parallax Ping triggers, but I get no readings from it :-( so... more work to be done.
Here's the code I used to debug the sensor (gleamed from this site) -
main:
LOW PORTC 0
HIGH PORTC 0
PAUSE 1
LOW PORTC 0
LET DIRSC = %00000000
PULSIN 0, 1, W0
sertxd ("The value is ",#W0,cr,lf)
pause 500 ‘ short delay
goto main ‘ jump back to the start
just added the sertxd stuff from the manual.
Any ideas on the ping??
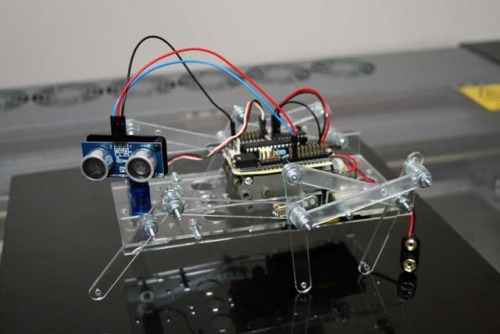
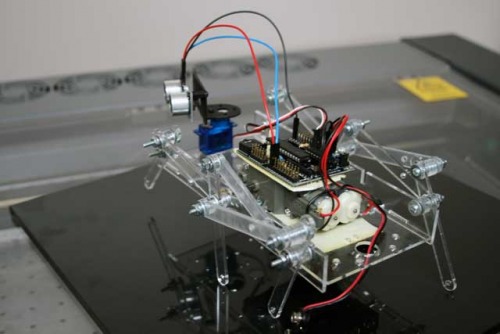
Navigates via ultrasound
- Actuators / output devices: 240:1 Tamiya dual gear box
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4 AA
- Programming language: Picaxe basic
- Sensors / input devices: Parallax Ping
- Target environment: Indoors is best