



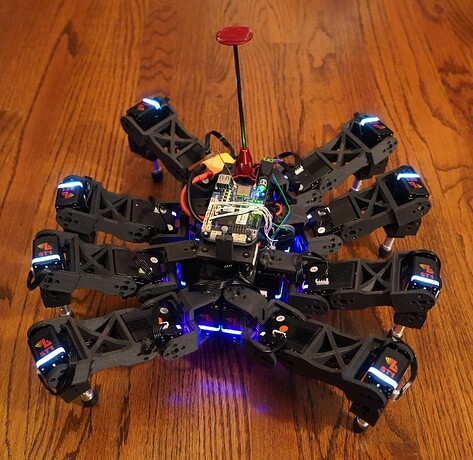
My friend and I made an 8-legged spider 🕷 robot named Spooder about two years ago as a high school senior project.
Here are the specs of Spooder:
- BeagleBone Blue(BBB) board with Debian 10 onboard.
- 24 Lynxmotion Smart Servos daisy-chained and sharing a single UART port.
- Controlled through WiFi with an iOS app my friend made.
- It has UDP live feed from Spooder’s perspective. See the demo videos for more details.
- All CAD parts are designed on Tinkercad and printed with Carbon Fiber Filled PLA filaments.
- Programmed in Python.

*the antenna is for a GPS unit that was not installed during the photo shoot.
*the camera was also not installed because I’m getting a new camera for it. (waiting for my OAK-D)
Spooder walking. The trajectory-control algorithm is to be improved.
My iOS App developer friend made this app.
A demo video during early development
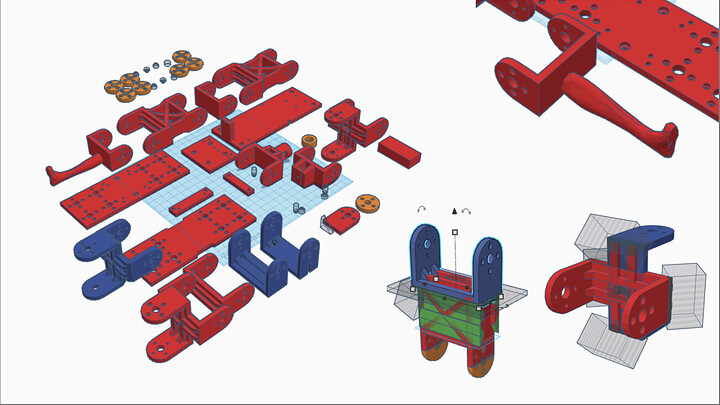
I made all the parts on Tinkercad
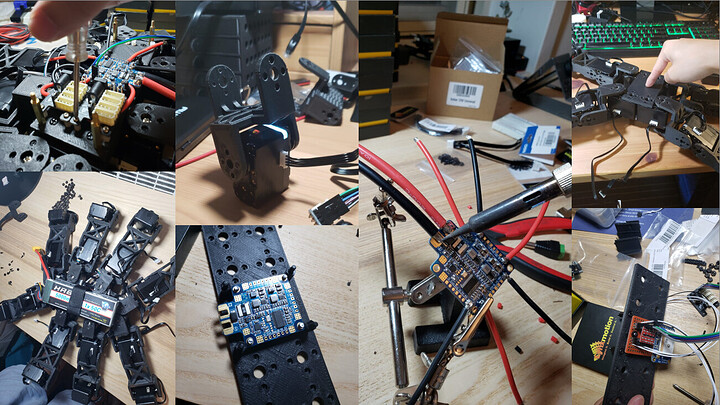
- I used a drone PDB to deliver power to all 24 Lynxmotion Smart Servos.
- TTL logic level converter to bridge the BBB’s 3.3V UART port with LSS’s 5V(I think?) logic level.
- The 11.1V lipo battery is strapped under the robot.
The Spooder project is also up on my personal website, here is a link to Spooder. Spooder is actually my second spider robot build. If you are interested in an 8-legged Arduino Spider robot that I made in 10th grade, check out Spidy. Spidy is based on an Arduino Mega and 24 cheap PWM servos.
Here is the Github Repo to Spooder.