



Spidey : A one motor walker (RC Version)
Meet Spidey and no, he does not use the Spider Controller! (Looks like a spider, thus, the codename Spidey, or maybe that's just me :D ) He's a single motor based walking robot and is apparently aspiring to become a BEAM bot. He's not up there yet; the movements are wobbly and upredictable, he's wrapped around with electric tape to affix everything onto the body. But the bottom line is, he walks!
Excited about the world of BEAM bots, a hobby that has always been there long before the Arduino kicked off, I recently started taking a look at the beam-bot wiki page for more details and information regarding the circuits, ICs, assembly processes, design structures, etc. It was our LMR member Yahmez, who had sent me a couple of inverters that are handy while building a basic BEAM bot, who got me really really excited about this interesting field of robotics.
THE BUILD :
OK, so let's head to a pretty short build that happened this afternoon. I was wondering on whether to work on WSSR, but thought of trying something new. I quickly googled for single motor walkers, saw a couple of neat designing techniques, got inspired, and attempted to have a go at building one of my own.
The single motor used by Spidey is a continuous rotation servo from DFRobot. I didn't find good gears (That's required for the robot's motion). For the time being, my eyes caught sight of an old toy car wheel along with an axle. I pulled of the plastic gear with a pair of pliers, and cut it into two halves.

I hot glued one half onto the servo horn.
I will talk about more on the gear mechanics ( that's failed gear mechanics ) used on Spidey. The next part was to create a pair for the previous gear so that it could simultaneously spin along while rotating the other at a slightly inclined angle. The figures should make it clearer.
For moving the rear legs, Spidey needed something that had a more of a tilted design as opposed to the horizontal position of the other gear on the sevo horn. I needed something that could rotate freely while the tilted gear was being moved. And at the same time, I needed all of that to be fixed onto the body.

The other half of the gear glued onto a long screw
I used a hex standoff that would allow the screw to freely rotate while the standoff itself at the sametime could be held stationary. That was crucial to achieving a 4 legged motion from a single servo.

The long screw along with the gear screwed into the hexagonal standoff ( These are awesome, I guess I got them from Dagu, but they can be found everywhere online, I guess )
Now onto the legs. I made some from coat hangers.

Hey, I'm kinda good at making these legs! :D Looks like playing around with DFRobot's Insect Bot payed it off!
And then, nothing fancy. I just hot glued everything in place to get something that looks like the one below :
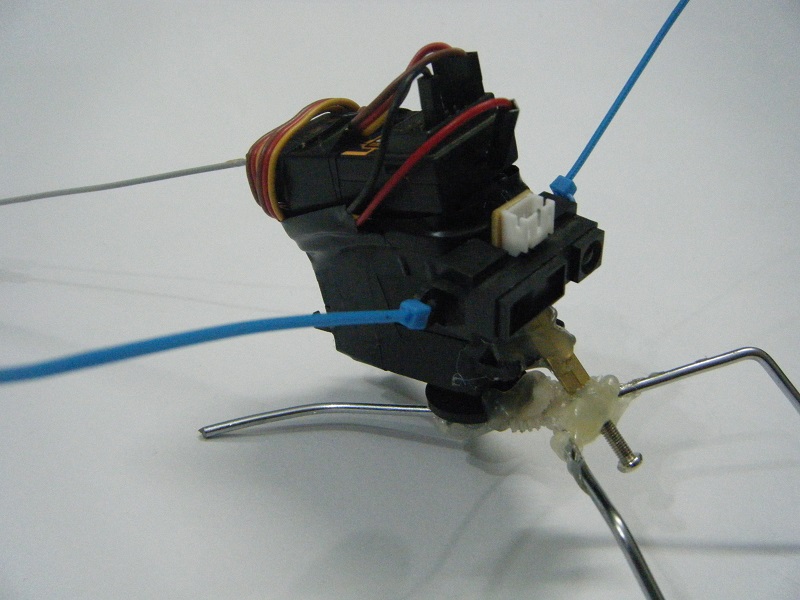
The robot is crumbling right now but hot glue is strong enough to hold it for sometime.
And here's a close-up of the gear mechanism. You can also view the video at the top for a better look how at how the gears are arranged.
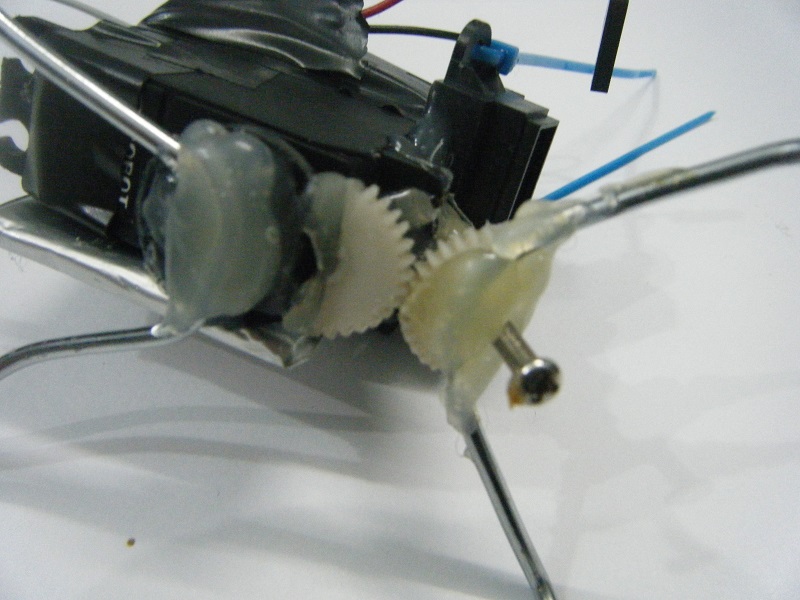
Notice how the gears on the rear legs are inclined to a certain angle that results in a change in direction of the regular motion of the servo towards these legs. And the ugly looks, bear with me!
While Spidey isn't actually a BEAM bot, it's actions might make it seem like one. However, Spidey is RC based right now. In other words, he is manually controlled through a transmitter. To meet the BEAM criteria, let's see what he needs to work on :
B = Bilogical : Look like an insect (Check, and a solar panel might come soon!)
E = Electronics : Make use of ICs and circuits ( A servo and a receiver won't make it up for that )
A = Aesthetics : Not quite there yet.
M = Mechanics : Need to change the gears along with a better orientation.
You might see a few more updates if I find some spare gears ( bigger and better ones as these tiny ones tend to come off so easily as can be seen in the video above. OR I would love to hear if you have some suggestions :-)
That's all for now. Thanks for passing by.
Ashim
Walks (and slides) around