


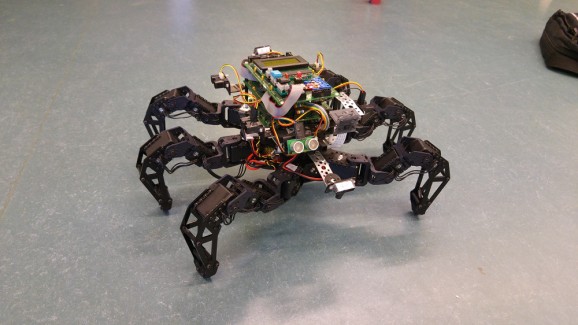
Spider Pig - Autonomous hexapod robot
Video:
https://youtu.be/N5_tMeEpJaA
Bachelor thesis project by a group of seven students (applied physics and electrical engineering) at Linköping University, Sweden.
The robot can navigate a simple maze (with both low and high obstacles) autonomously and be controlled manually with an Xbox controller connected to a laptop. It communicates with the laptop over Bluetooth.
The system is divided into three subsystems (control, sensors and communication), with one microcontroller each. The subsystems communicate via an SPI bus.
Its walking algorithm is based on inverse kinematics. A PD controller is used to keep it centered in corridors.
Main hardware:
- 1x PhantomX AX Metal Hexapod Mark II Kit (including 18x Dynamixel AX-12 servos, excluding the ArbotiX Robocontroller)
- 3x ATmega1284p microcontrollers
- 7x IR distance sensors
- 1x ultrasonic distance sensor
- 1x MPU-6050 IMU
- LCD display
- FireFly Bluetooth modem
- Raspberry Pi 3 Model B
- Raspberry Pi Camera Board 5 MP