



Some say it looks like an iron
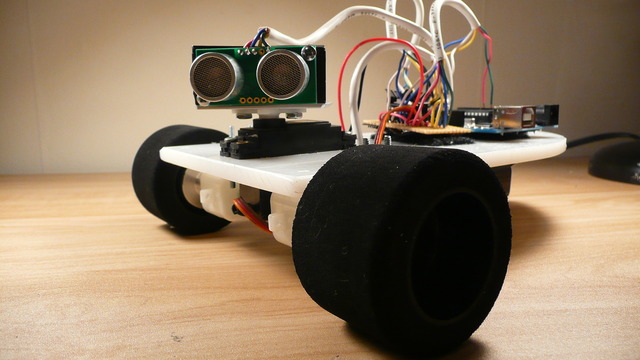
Well here's my first attempt at a robot. Seems like everyone I've showed it to asks me if I traced an iron for the base :)
Little disappointed by the speed of the GM9 motors. I really should have gone with bigger wheels, but I just thought these looked cool. Had to turn down some adaptors to make them work since they don't sell them.
Next time I order motors I think I'm going with some spur gear motors. Just wish I didn't have to buy an expensive motor controller for them :(
Base is made of 1/4" HDPE that I got from McMaster Carr for really cheap if anyone is interested.
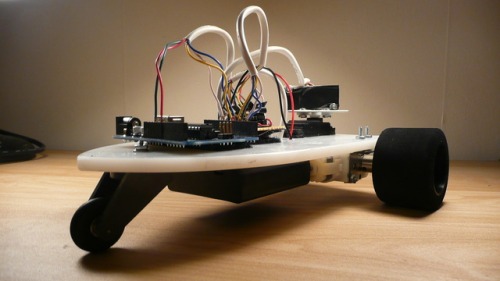
Back wheel is from robotshop.us
I attached my program in case anyone needs help with Arduino. Not the greatest coding, but oh well.
Piezo buzzer in the code is not shown in my pictures.
Future Plans:
-Wiring up my TSL230 light sensor from Parallax. Going to try to get this guy to search out an LED lamp on my floor.
-Build my controller using a wireless transmitter/reciever, serial lcd, and wii nunchuck
-The code currently allows me to connect the robot to my computer and press A (Autonomous) or R (Remote Control) using the serial monitor. The controller with allow me to select modes, drive with nunchucks accelerometer, and see what robot is doing/seeing via serial lcd.
Video soon!


Just drives around for now
- Actuators / output devices: GM9 motors
- Control method: Autonomous/Remote
- CPU: Arduino
- Power source: 4 AA
- Sensors / input devices: SRF05 Ultra Sound
- Target environment: indoor