


Snapper
UPDATE 2:
Project has ended and robot is disassembled. link
UPDATE 1:
Since i changed from PIC to Atmega, I remade this bot's whole brain. H-bridges and motor controllers were a headache so I changed motors to servos. Also now i have new power source, 5x AA NiMh regulated to 5V for electronics. Hmm. New pictures soon.
-- Original --
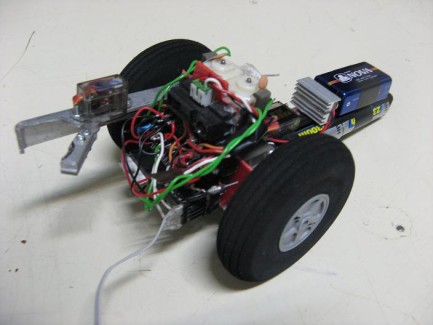
First bot what is entirely my built and has sensors what are connected to brain. Now it just moves its gripper open and close and does other preprogrammed activities. First i tried to use prototypeing board (green one with premade tracks) but everything failed so i moved to self made breadboard. I know that it is a mess of wires, but it is really handy. All parts are from eBay & Farnell.
It has such name because all it does is snaps.
Bigger batteries are for motors & servos. 9V for electronics and sensors. There is a voltage regulator hidden in that heatsink.
I'm using L298N to drive motors. For some unknown reasons servos sometimes go grazy if i motors run, and i think motors are too big for this robot. I'm thinking of changing over to 2X 9g servos. It could use tiny omniwheel or roller to tip of tail.
Idea is that it moves around and if it finds anything it can use its tail servo to tilt whole body + arm. By doing this it can scan the height of thngs and crab things from different angles. If it crabs something it pulls prey to its lair.
(Soon: more sensors, activity and videos.)
Nothing much
- Actuators / output devices: 2x Continous Rotation servo's for wheels, 2x 3.7g mis(t)ery servo
- Control method: IR remote and full auto
- CPU: atmega88
- Operating system: undefined
- Power source: 5x AA NiMH
- Programming language: C
- Sensors / input devices: Sharp GP2D12 IR sensor
- Target environment: flat surfaces