


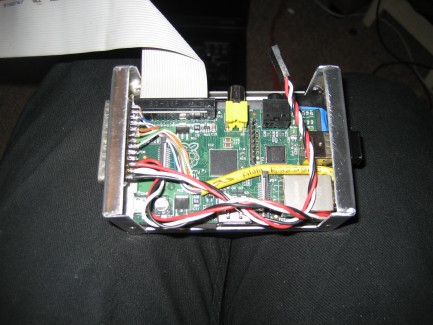
small robot head mk2
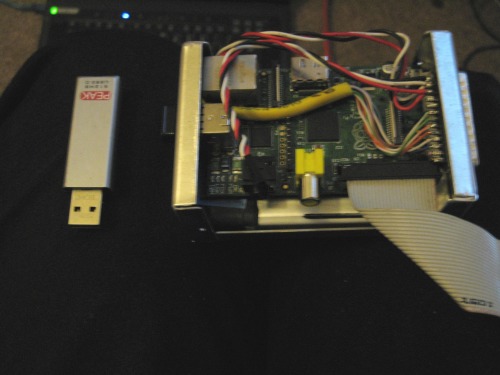
This is my attempt at a modular robot head running a raspberry pi a pair of web-cams and servos
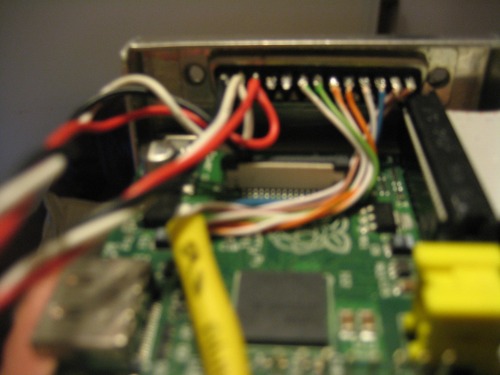
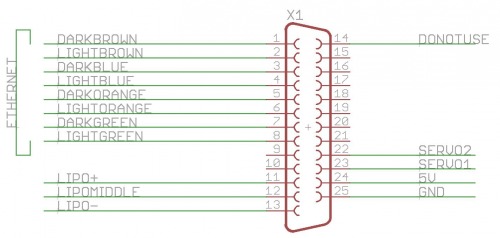
the modular part is the db25(parallel plug) connector to the neck/body that has connections to the battery and balance wires for external charging, Ethernet and other auxiliary pins that are unused so far (ribbon cable from the pi).
This connector will have a matching connector on the body/neck of the robot and also a set of separate breakout cables for debugging on my desk when disconnected from the body.
The Ethernet is essentially my take on a robot nervous system carrying data to an from the head

Modular Head, Computer Vision,
- Actuators / output devices: micro 9g servos
- Control method: WiFi And Ethernet
- CPU: Broadcom bcm2735
- Operating system: Raspian
- Power source: 7.4v 3.8ah lipo cells
- Sensors / input devices: 2x usb webcams
- Target environment: Indoor or outdoor