



Skydiver
Skydiver can move on the ground or be lifted on a weather balloon. During its whole mission the robot measures the background resp. cosmic radiation and capture videos, which are stored on a micro SD card.
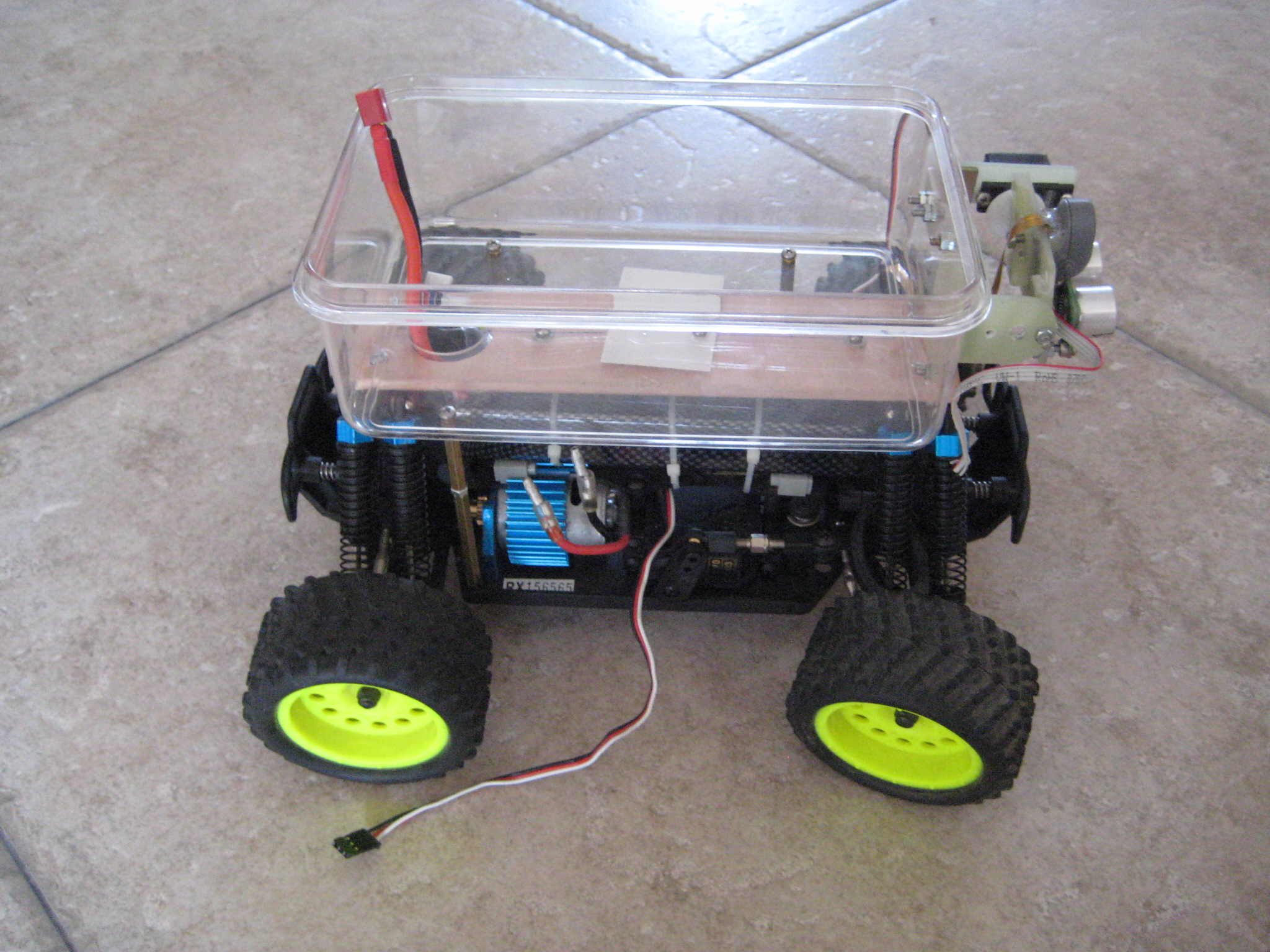
The body is a plastic lunch box, quite stabile and easy to drill. I have replaced the previous track platform by a RC buggy chassis:
The Geiger counter clicks will be transmitted by a hacked 0.5W walkie-talkie:
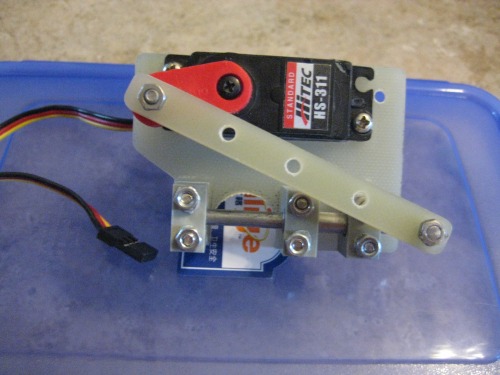
On its top of the robot will be a release mechanism mounted to seperate the robot from the weather ballon when the required altitude is reached (timer):
The parachute is made from Nylon and has a diameter of 1.5m:

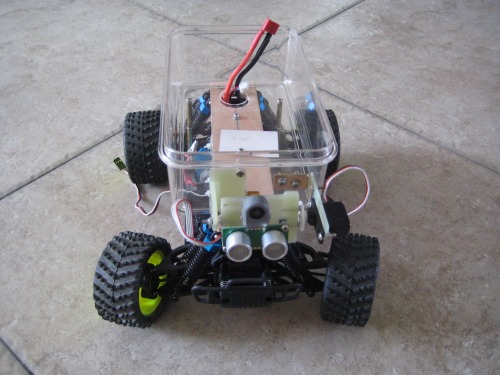
The camera is mounted above the ping. The ultrasonic sensor and camera point downward during descent. I am planning to use two retrorockets, mounted on the robot, to decelerate the fall at the last few meters. The rockets are triggered by the ping. If the surface is reached (and the robot still not damaged), the parachute will be decoupled and ping and camera horizontal aligned before the robot continue its journey on the ground.
Skydiver hanging out:

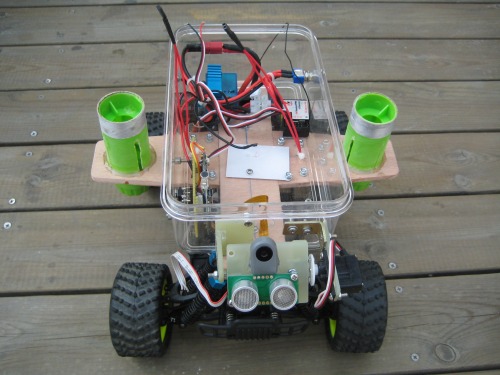
Retrorockets mounted:
Geiger counter board finished:

More soon...
Sky dives
- Actuators / output devices: 2 servos, 2 geared motors
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: Li-Po 7.4V / 4000 mAh
- Programming language: Basic
- Sensors / input devices: SRF005, camera, Geiger counter
- Target environment: Outdoors, sky