



Sky diving man
On August 16, 1960, Joseph Kittinger jumped from a balloon at 31,300 m. He fell for four minutes and 36 seconds, reaching a maximum speed of 988 km/h before opening his parachute at 5,500 m. He set historical numbers for highest balloon ascent, highest parachute jump, longest drogue-fall and fastest speed by a human being through the atmosphere.
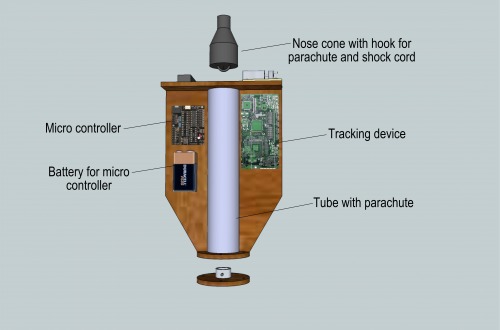
I have updated the prior design and this is how it should work:
The principle is the same as for model rocket parachute ejection.

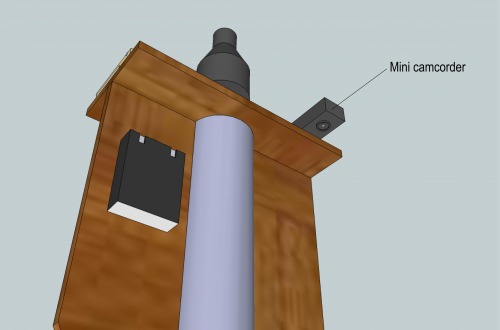
The FlyCamOne eco V2 camera was very disappointing. 170 mA at standby and interference-prone. I'll replace it by something like this.
Below you see a dismantled C6 rocket engine. The small part on the left is the ejection charge.

2010.10.13
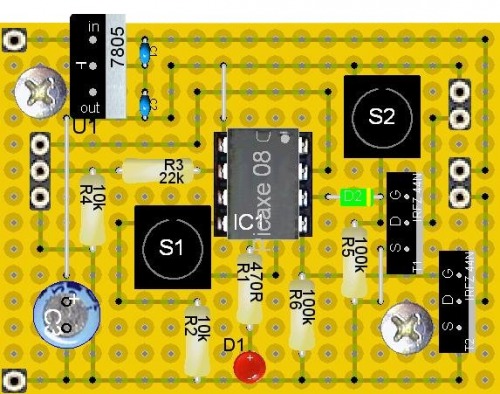
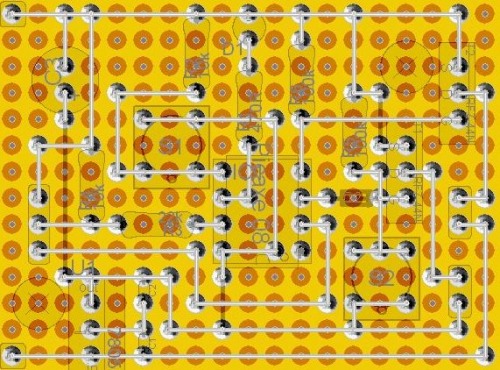
Designed the controller perf board with LochMaster to keep in compact:
2010.10.16
Sky diving man under construction...I added a wing to increase the CV value. I have also attached a short test video of the parachute ejection system.

2010.11.06
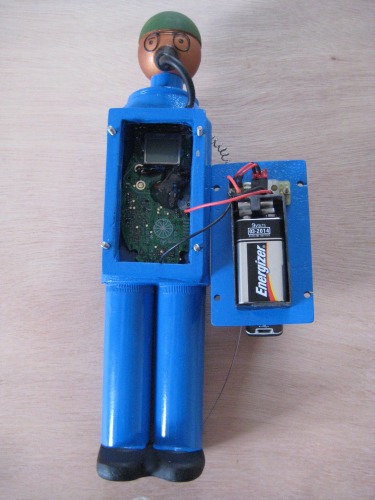
Updated the design completely again and gave the skydiver a more manlike look. The body is made from a appIe juice bottle, two ping pong balls, some plywood, epoxy resin putty and other scrap. I waived the parachute ejection by black powder. This was anyway not the best idea in combination with a hydrogen filled balloon (see Zeppelin Hindenburg...). The skydiver will now be lifted on its opened parachute via weather balloon and released on an altitude of around 1km. The robot is still equipped with a tracking device and a small camera with micro SD card. I found an interesting 9V battery with 1250mAh (Lithium-Manganese Dioxide) which will power the tracking device around 5 hours. The data sheet of this battery can be find attached.

2010.11.07
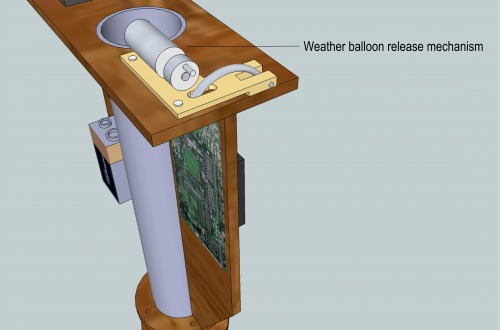
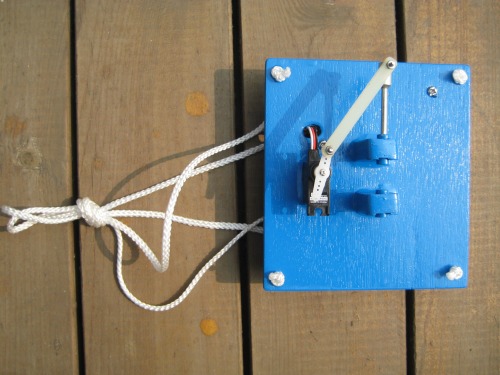
Pictures below show the release platform of the skydiver. On the top side is the power supply and a programmable timer (via push buttons), on the bottom side the release mechanism. Times between 1-3 minutes can be adjusted. The ascent rate of the weather balloon will be approx. 320m/min. The release platform will be lost in near space...

2010.12.02
Finally the nylon parachute for Joe arrived. The parachute has a diameter of 24". My wife stitched a cord loop on the top of the chute. The picture below shows the complete setup for launch on the weather balloon. I have also attached the circuit diagrams for tracking transmitter and release mechanism control unit.

TBC
sky diving
- Actuators / output devices: 1 x geared motor
- Control method: autonomous
- CPU: Picaxe 08-M
- Power source: 1 x NiMH 3.6V/800 mAh, 1 x 9V
- Programming language: Basic
- Sensors / input devices: video camera, Geiger counter
- Target environment: sky, near space