


Sir Lancelot
Desription:
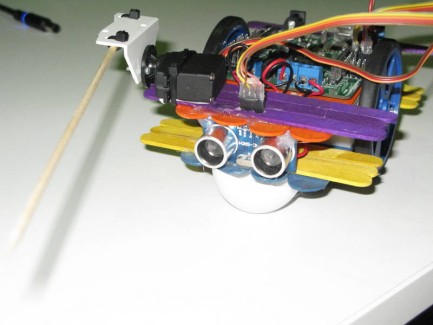
This is 'Sir Lancelot' the robot I build friday afternoon on Campus Party. Based on a DFRobot RoMeo board (Arduino compatible with motor driver it is build totally from scratch with the materials available in my campus party baggage.
The main use for Sir Lancelot is to pop balloons. With its Ultasonic Sensor he can detect obstacles. At a distance of 30cm before the object the robot will lower the lance and tries to pop the balloon (or whatever is in its way).
Sorry for the lousy video quality. Will make a better one when software is finished.
Sourcecode can be found here.
Partlist:
- RoMeo AllInOne Robot controller. ATmega168 CPU with Arduino Bootloader and a L298 motor controller
- 6xAA cells as power supply
- 2 x Solarbotic GM8 motors
- 2 x Solarbotics wheels
- 1 mini sevo
- coloured popsicle sticks
- 1 skewer used as lance
- 1/2 table tenneis ball as 3rd front wheel
Build process:
Some pictures of the biuild process:
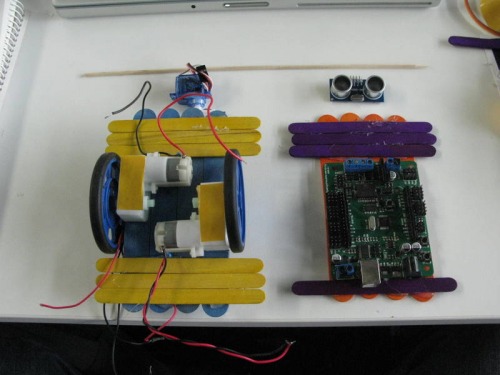
Most of the parts that have been used to build the robot. Later on I relaized that I will need a 3rd wheel. So I go out and buy a pack of table tennis balls. A half table tennis ball has the perfect size fo the 3rd wheel.
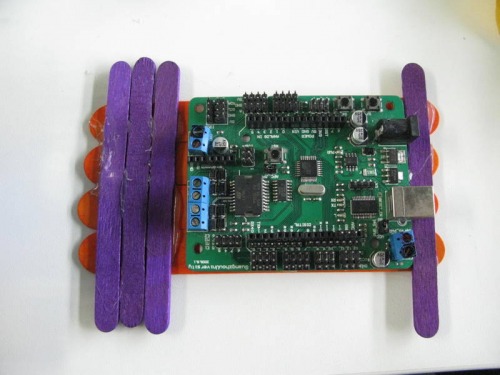
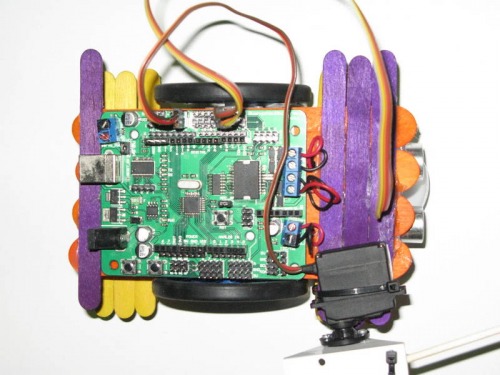
Upper deck with RoMeo board.
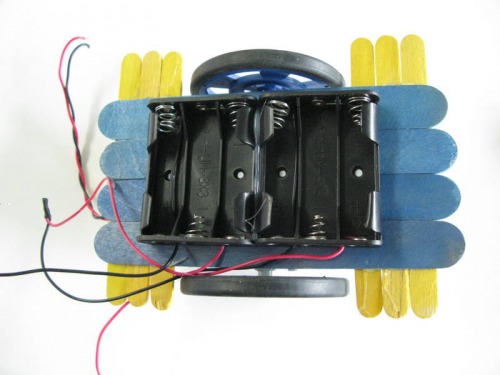
Lower deck with motors...
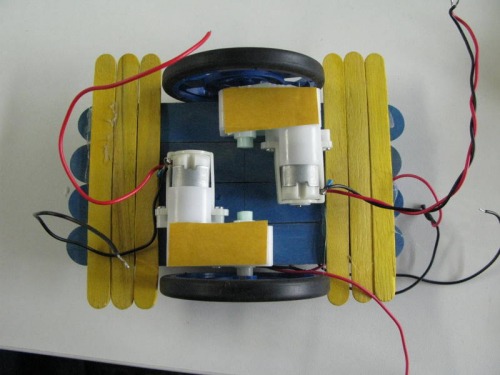
... and battery holder.
Building comleted.
Search for balloons and tries to pop them
- Actuators / output devices: 2 geared motors
- CPU: Atmel ATmega168
- Power source: 6xAA
- Programming language: Arduino C++
- Sensors / input devices: HC-SR04 ultrasonic sensor
- Target environment: indoor flat surfaces