



Simple robotic hand
During long winter evenings I decided to build something to play with. I started from a scratch and this is the result. It is the regular copy/paste appearance robotic hand. It is possible to buy several models from Lynxmotion. But you would miss the discoverers' adrenaline way.
Basic movements:
- Servo0 - Base rotation 180° degrees
- Servo1 - Arm up/down 90° degrees - but using angular mechanism to utilise 180° servo movement
- Servo2 - Hand up/down 160°degrees - limited by design
- Servo3 - Palm up/down 180°
- Servo4 - Palm rotation 180° degrees
- Servo5 - Fingers 2cm to 7cm width
Power source:
Shimastu Lead- Acid accumulator 12V 1,3 Ah
This is really necessary, because the peak current drain easilly exceeds 3 amperes
Two independent voltage regulators are used.
- Picaxe standard board is equipped with one.
- For servos I used regulated Heavy duty regulator tuned to 6V. It is designed for 3A constant drain. Peak limit is by it´s heat - 105° C.
Actuators:
4x Hitec 422 servos
1x noname servo - palm rotation
1x Graupner 141 servo - smallest - high torque
Construction:
Aluminium profiles - from Baumax stores - easy to be cut on kitchen table (don´t tell my wife).
Simple tools are available -like this one 10$ drill.

Construction details:
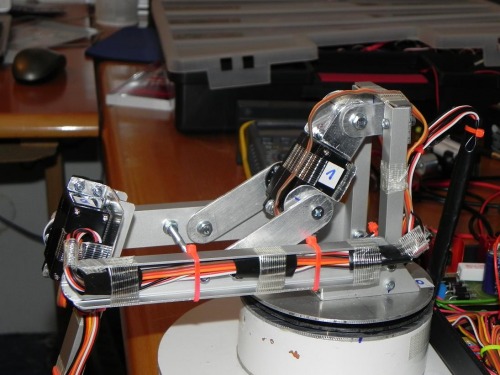
Angular mechanism.
When the hand is in horizontal position, the force required to move it up is at maximum. In this situation the angular mechanism provides the highest totque from the servo. At the starting point it is mathematically unlimited. In reality it moves 500g load plus main hand weight on 0,5 m long arm.
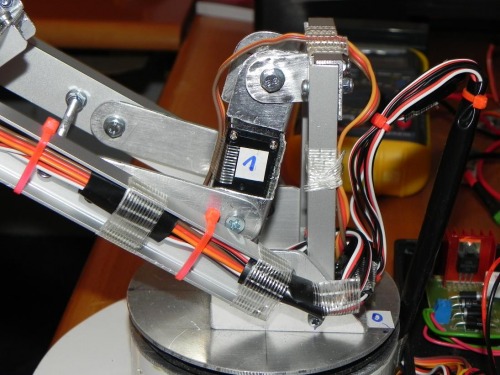
It uses 180°degree servo movement on 90°degree arm path. Also it is designed to give highest torque when the arm is horizontal.
Precise dimensions are required to get the result. I can provide precise dimensions on demand.

The "elbow" servo is the most critical. I used 13 kg torque, metal geared, but it seems to need something better.
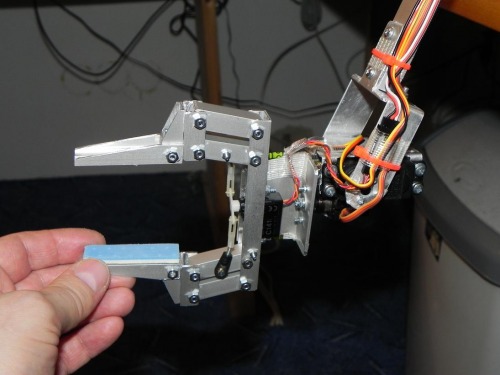
Fingers are driven by smallest Graupner C141 servo. Jaw mechanism is based on parallelogram. \Whole unit is on alluninium plate moved in 2 dimensions - rotate, tilt.
Manipulate objects
- Actuators / output devices: 6x servo
- Control method: program
- CPU: Picaxe 28x1
- Power source: 12V 1, 3 Ah Lead-acid shimastu accumulator
- Sensors / input devices: no sensors yet
- Target environment: indoor flat surfaces