



Simple PID LFR using PICBasic Pro 2.46
Project Name: Simple LFR PID using PICBasic Pro
Author/Designer: holy_rainman
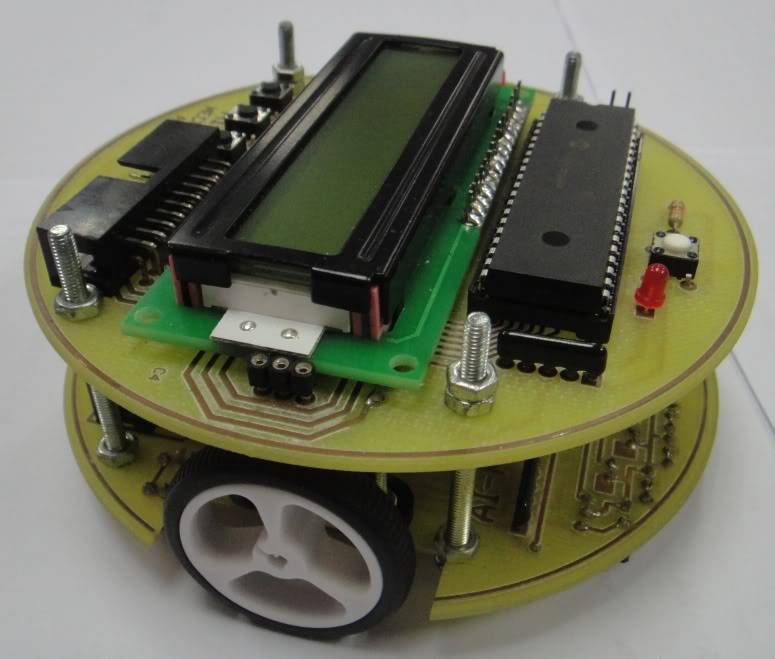
Project Description: To implement classic PID control algorithm to the Line Following Robot using Basic Language. The sensors used are from CYTRON SN-IRS-02 (thanks for the cute sensor) and are processed using analogue method. The motor driver used are L293D + micrometal gearmotor 30:1 which are common in mobile robot . I made the PCB board stacked together cause it gives a compact image towards the robot. I put on a common LCD to scroll the menu and to ease the troubleshooting process. The hardware cost around RM 250. The robot from the video are a bit sluggish cause the optimum pid value was not tuned at that time. Need a bit tuning, tweeking and some trial and error to obtain the correct value.
Photo/Picture/Figure/Diagram/Flowchart:
The LFR:
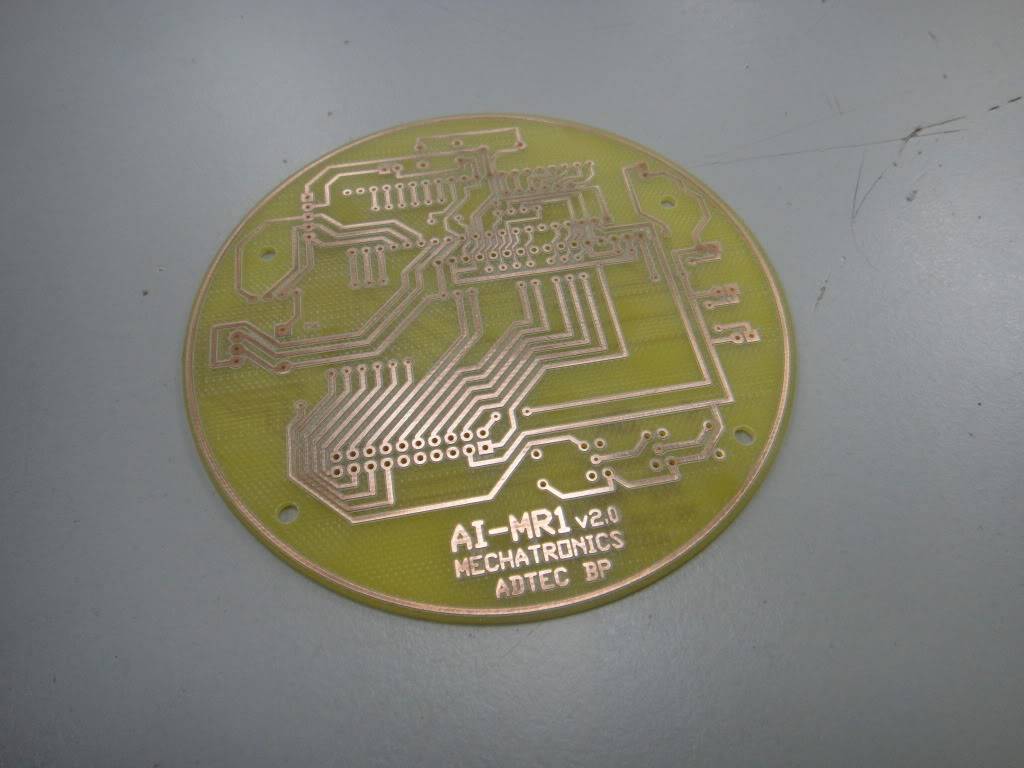
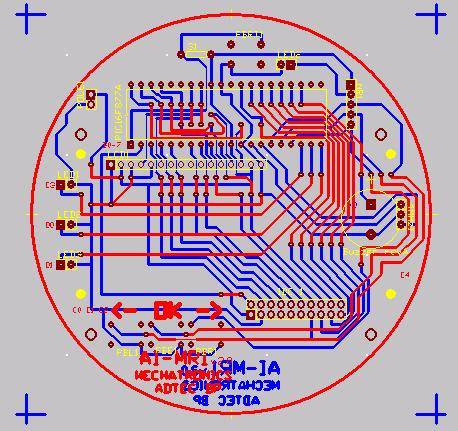
PCB Top 1:
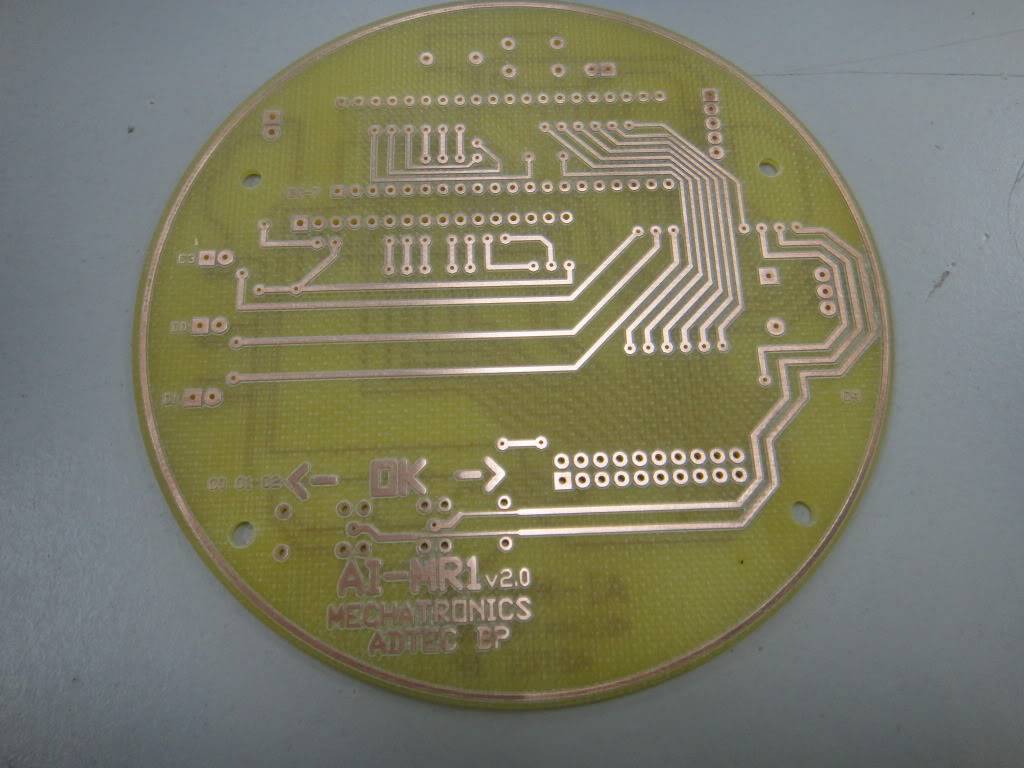
PCB Top 2:
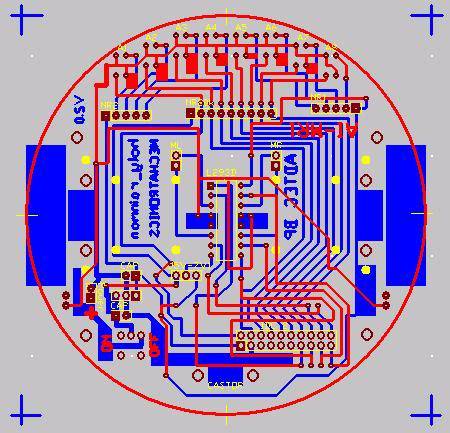
PCB Bottom 1:
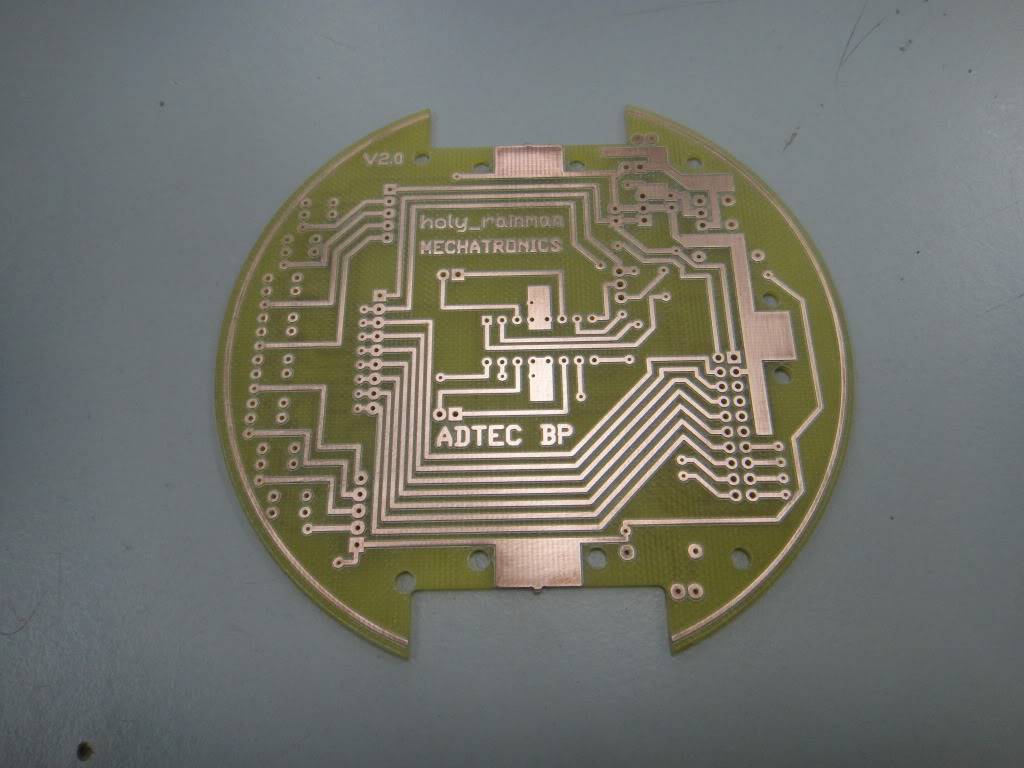
PCB Bottom 2:
Compiler: PICBasic Pro 2.46
Source code: Basic Language
Schematics & PCB Docs:
PCB Top:
PCB Bottom:
Programing: Refer file as per attached.
Follows a line
- Actuators / output devices: Micrometal Gearmotor 30:1
- Control method: Autonomous.
- CPU: Microchip PIC16F877A
- Power source: 7.4V Li Po Batt
- Programming language: Basic Language
- Sensors / input devices: 8 units of IR sensor
- Target environment: Indoors is best