


Simple Hexapod Walker
Starting off this submission -
A small project to build a small hexapod walker - Whilst working on a bigger 'bot, I thought I'd make my first real robot, a bit less ambitious - I'll be providing some updates, and some video, but this posting is just really to get the feel of the LMR site and to get the ball rolling - I'm hapy to share designs etc. with anyone interested
My criteria for the project :-
1/ must cost less than £30 GBP (plus a BS2 Stamp and Board) that incudes servos etc.
2/ a dummy (me) must be able to make it out of materials available in my DIY shop, electronics shop or junk
3/ must be able to be constructed in a weekend using DIY tools
4/ Design it from scratch (more fun that way!) - though I have to acknowledge lots of inspiration from the "insectibot". and a lot of help from the parallax forum in problem solving ( thanks guys)!.
5/ Must be small enough to fit in my desk drawer-
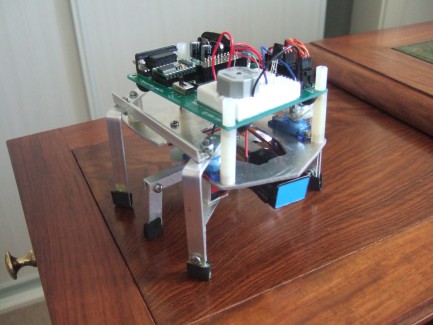
I just finished the physical manufacture (see above) - I've rigged it to be controlled through an old TV controller, so far I've just got it walking forward backward and turning - this uses the "alternating tripod gait" so only requires 3 cheap 9g servos (£3.99 UK each) with a few modifications to keep the cost down. Another reason for keeping it small !
Control is from an old TV remote through an IR detector (under £2) which seems to work really well. So far my code is very simple to prove it moves and that the control system works.
Next step is to write some more sophisticated walking routines. If anyone is interested, I happy share my designs and code.
Hexapod Walker
- Control method: Television remote
- CPU: Parallax BS2