



SilentBoB
Although it's now 2017 I still get requests for code used in this project. The version used in the last iteration of SilentBoB has been posted above. AndysEasing library and the NewPing_v1.5 library are required and have been included in the zip file. You will also need the slave arduino code that drives the led pixels, as well as the CYZ-RGB pixel hex file to program whatever attinys are used for the pixels. The CYZ-RGB page is long gone but I had saved a copy as well as the AndysEasing library page. Everything is included in the zip file.
Introduction:
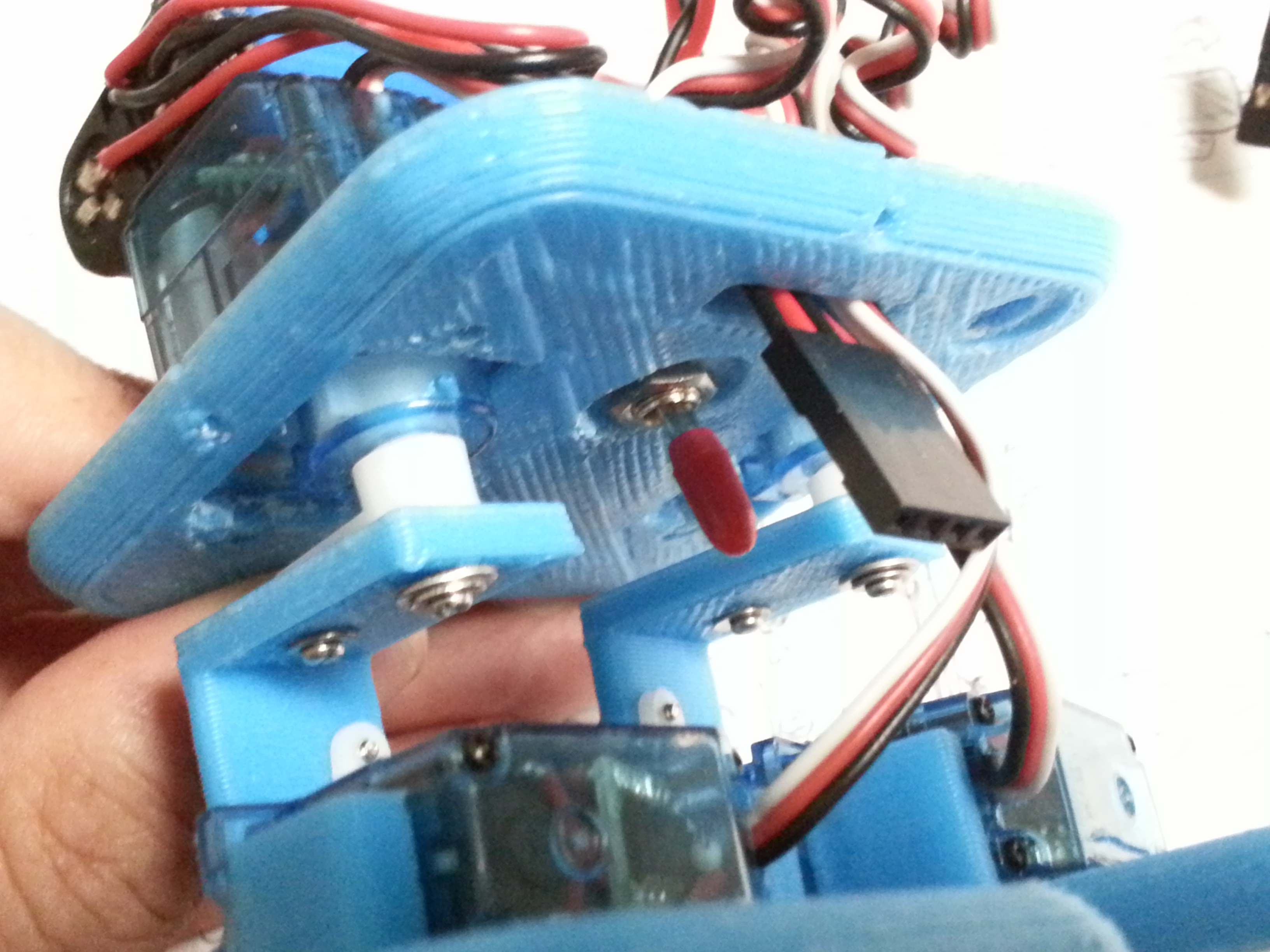
SilentBoB is a 4DOF biped walker that uses the BoB the BiPed chassis created by K120189. The BoB chassis was printed out by isotope in glow-in-the-dark blue ABS. Many thanks to him or this bot would never have come to fruition.
This bot is named "SilentBoB" because I had great plans to add audio and sound to the list of features but the chassis ran out of room. Although he is quiet, SilentBoB will be in not-so-quiet environments. He will hang out with me during Seattle Seahawk games at sports bars, football parties, or whatever. The Seattle Seahawks are a less-than-respected team of America's professional football league, the NFL. I usually cheer by myself and it's hard to be an army of one. So I made SilentBoB who will celebrate the Seahawks along side of me wherever we go.
Build of Materials:
BoB Base robot:
BoB chassis: $ unk (isotope)
9g servos (x4): $10 (ebay)
HC-SR04 ultrasonic sensor: $3 (ebay)
BoBblebot custom Arduino board: $15 (me)
BoBlights custom board: $7 (me)
SMPS module: $3 (ebay)
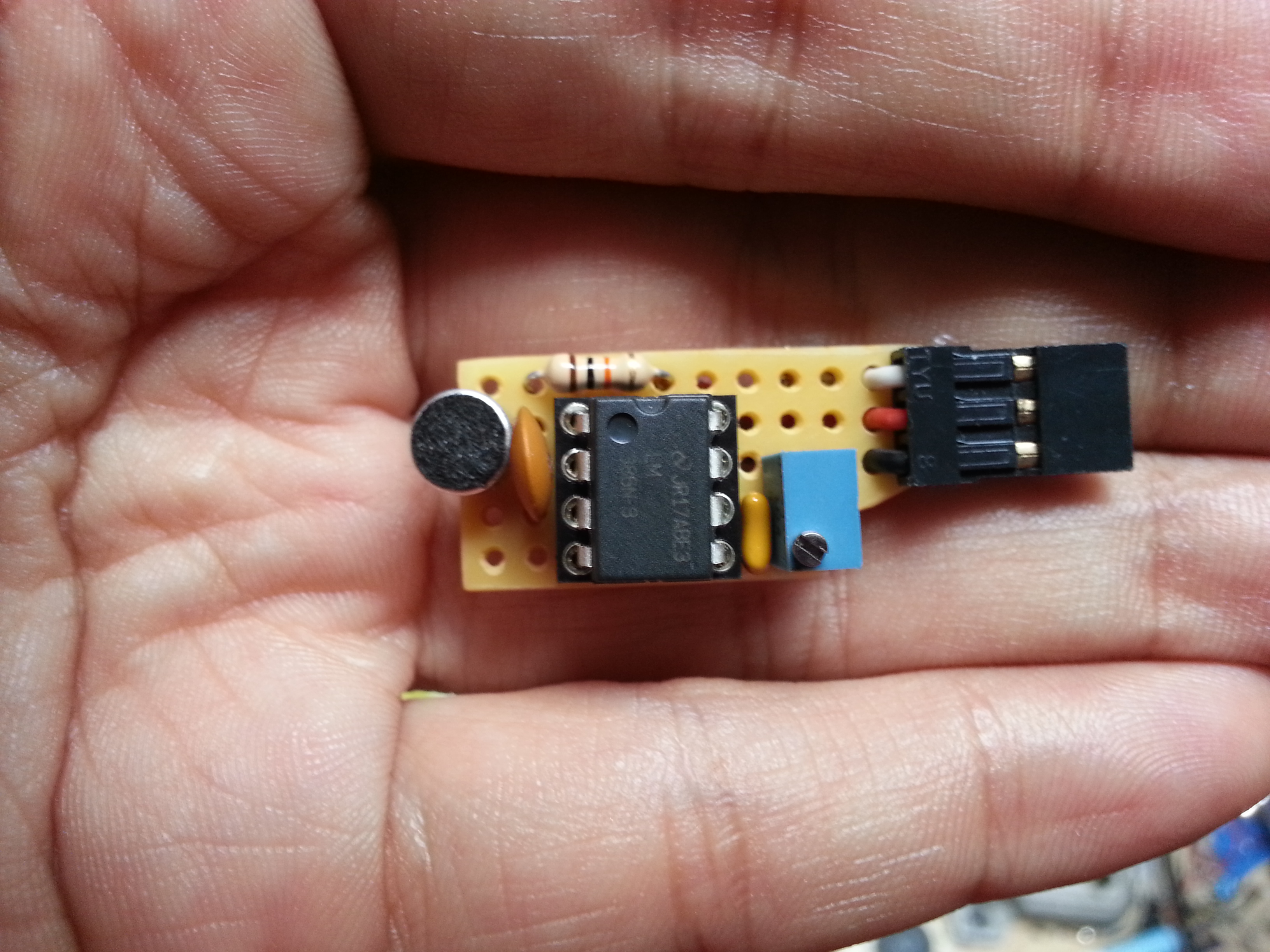
Custom LM386/mic perfboard module: $3 (me)
Edge detectors: $1.20 (+ salvaged servo cables) (me)
----------------
$42.20 - chassis cost
Hawk Swag:
Yarn for hair: $6 (ebay)
Pack of throwback Seahawk stickers: $8 (ebay)
Stikfas Cuboyd toy robot: $5 (ebay)
Mini foam finger: $5 (ebay)
Toy football from old vending machine football helmet pairing: $1 (ebay)
--------------------
$25.00 - swag cost
Description:
SilentBoB is able to wander around the bar or coffeetable while avoiding beers and The Edges of Death. Obstacles are detected with the HC-SR04 sonar using the NewPing arduino library. Edge detection is done with CdS cells embedded in the feet to detect light:

The sensors feed the data to a custom ATmega328-powered Arduino board in the classic OSHpark purple and gold color scheme:
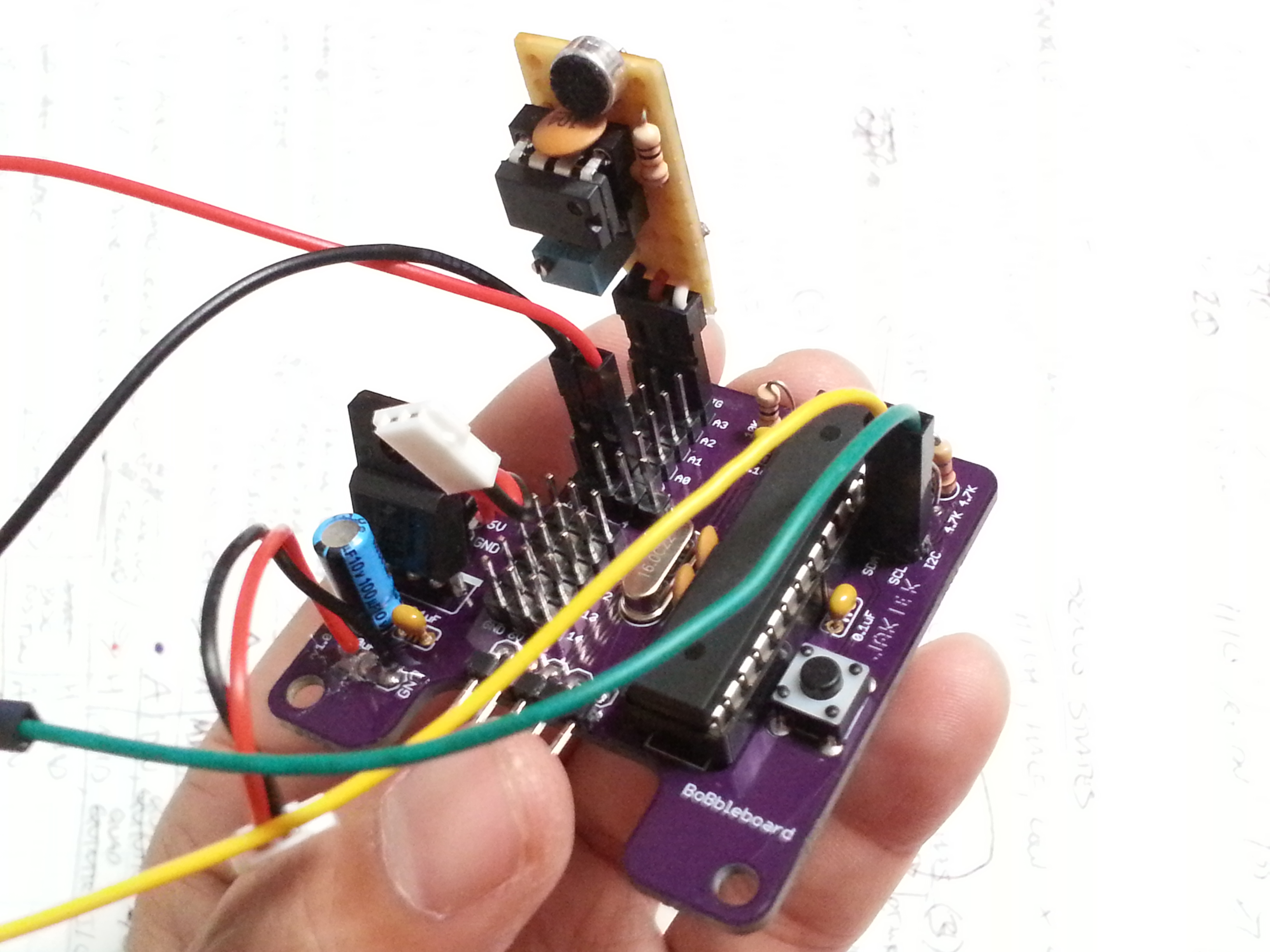
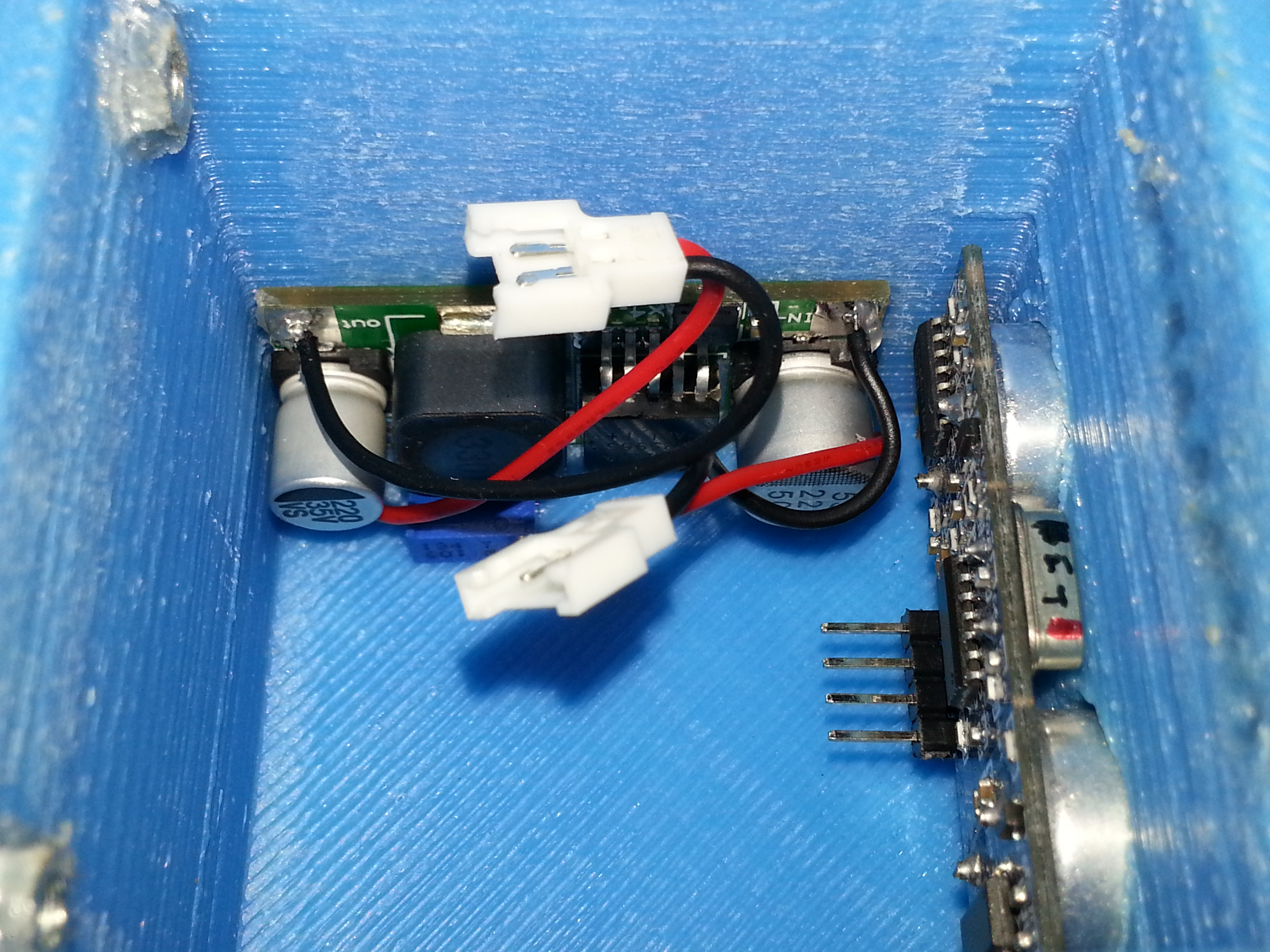
The 5V supply is handled by a KA378R05 3A ULDO regulator. There are headers available for another digital input, three analog inputs, I2C connections, and another servo or other device with a 6V power pin. The 6V power is supplied from an adjustable LM2596 module I got from eBay. I had a hard time fitting it in but it keeps the robot a lot cooler than when a linear voltage regulator was used.
The whole thing is running off a dual rechargable 3.7V Li-ion AAA/10440 battery pack that I added a wiring harness to that allows for individual cell charging without the need to remove the batteries from the robot:
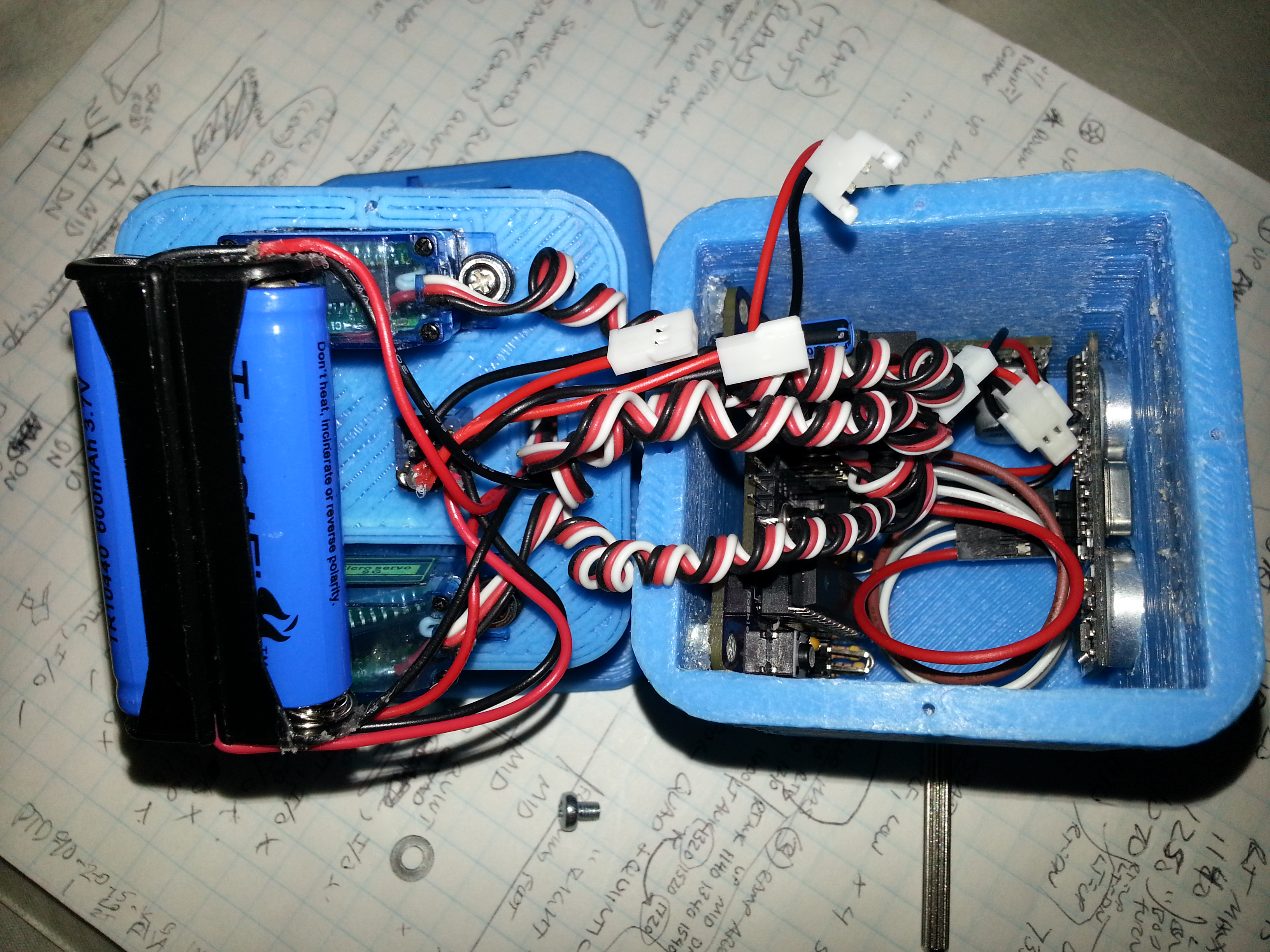
Power switch included where I thought it was anatomically and mechanically sound.
Besides the standard autonomous mode SilentBoB also has SeahawkFan mode where he sits and watches the game with me and dances when I applaud the excellent plays.
SilentBoB listens through an electret mic amplified by an LM386 audio amp:
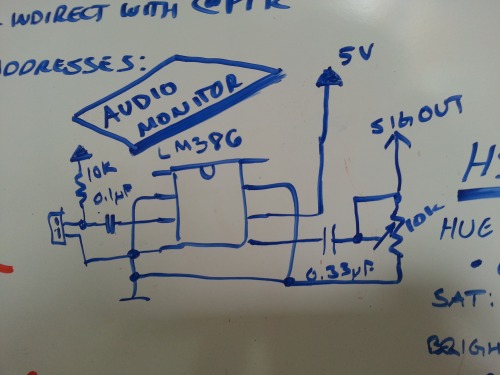
This audio signal is fed into an ADC input and when the volume of clapping gets loud enough (you need to be close to the bot) it will activate a sequence of "dance" moves and appropriate light patterns. I only have a few dance sequences; it's hard to come up with lots of sweet moves on 2DOF legs.
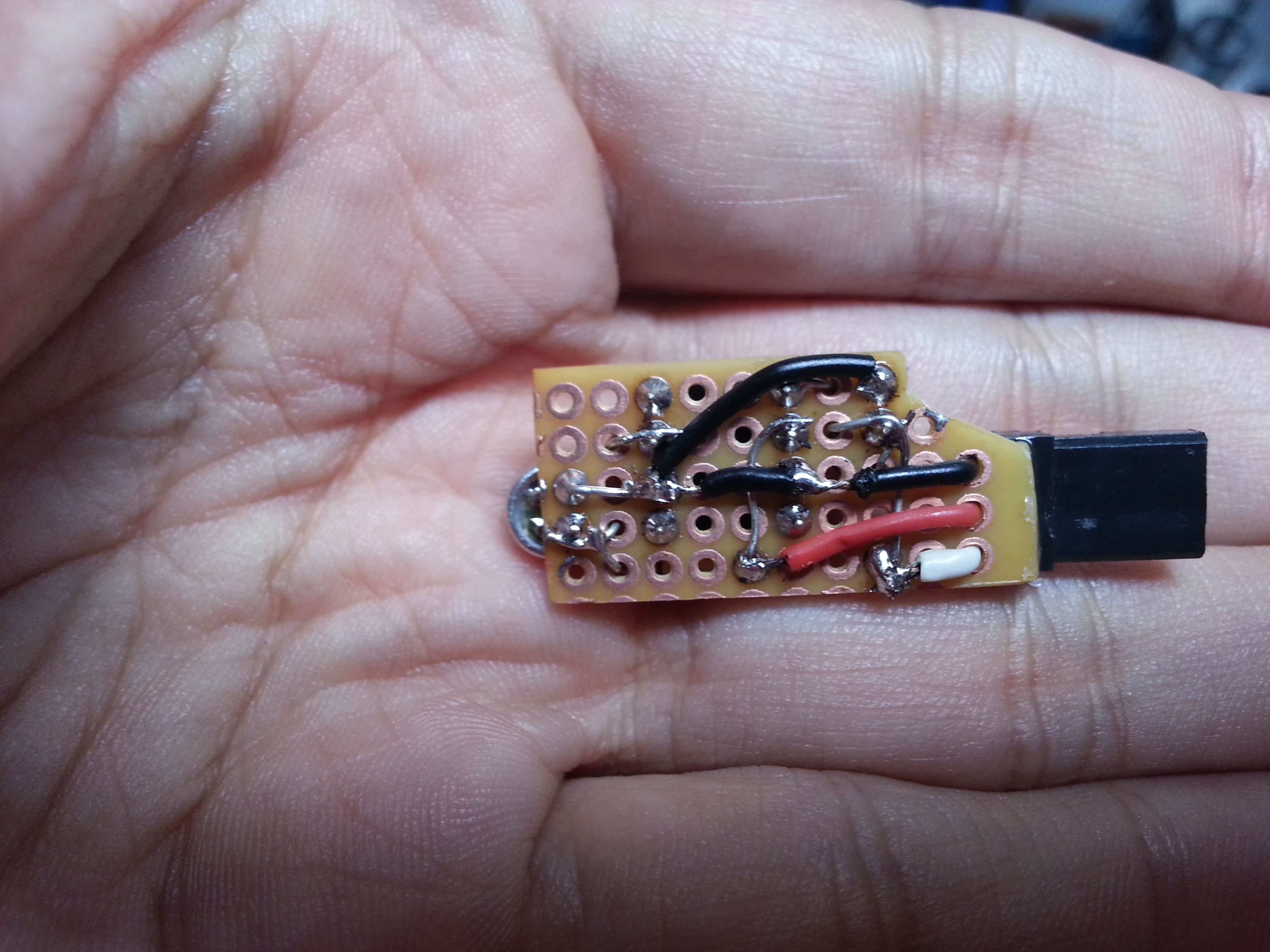
The light displays are all handled by a set of microcontrollers headed by another '328 Arduino chip. It is in charge of giving commands to the three separate BlinkM LED pixel clones (called CYZ-RGB LED pixels) built onto the custom BoBlights board:
CYZ-RGB pixels are made up of a 5050-sized RGB SMD LED paired with an ATtiny45 chip. The ATtinys take I2C commands and handle the grunt labor of calculating the LED's PWM frequencies and fade rates. In this setup the second arduino and the main Arduino share master duties on the I2C bus. The main Arduino tells the second arduino what SilentBoB's "mood" is. The second Arduino busies itself with creating appropriate lighting sequences and manipulating the LED pixels.
Hotglue was injected into the mouth holes to help diffuse the light for better viewability:

I added some appropriately themed extras:


The arms are courtesy of a Stikfas Cuboyd Robot figure. The torso was sawed in half and hotglued to the chassis.
And did I mention he glows in the dark?!?!?
If I could've shoehorned an audio module in there I might have named him DeadJediBoB.
Summary:
The good points:
- My first Arduino project and it works as I had hoped it would.
- Looks better than I had ever hoped it would.
- Build time was short; only a few months.
The low points:
- Ran out of space! Should have went all-SMD.
- My choice of edge detectors is useless in the dark.
- Runtime shorter than the duration of a football game.
Videos and more information about SilentBoB's development can be found in the associated blogs.
Wander autonomously, increase team pride, celebrate with dance and lights
- Actuators / output devices: 4x 9g servos
- Control method: Autonomous and SeahawkFan mode (clap control))
- CPU: Arduino on ATmega328P
- Power source: 3.7V Li-ion 600mAH AAA batteries x 2
- Programming language: Arduino ide
- Sensors / input devices: HC-SR04 ultrasonic sensor, LDR edge detectors, clap detector.
- Target environment: indoor flat surfaces