


SHR Reborn
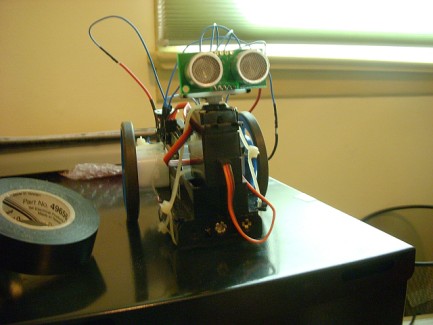
This robot is a rebuild of my Start Here Robot. One day I was looking for things to do(other than clean my work bench) and saw my my SHR sitting there and thought why don't I build that nicer and add some line sensors to it. So I did.
Its just a basic SHR with a few line sensors on the front in a fancy shell. So far I coded it to be a basic object avoider, and line follower with plans to make it a sumo bot also. I lost all the code except for the line follower code when my laptop died so I have to rewrite it.
I will post more detailed pictures next week when I get a chance.
Its a sumo bot, line follower, and object avoidance, all in one little package.
- Actuators / output devices: 2 motors, 1 Servo
- Control method: autonomous
- CPU: Picaxe 28x1
- Operating system: Picaxe basic
- Power source: 3x AA
- Programming language: Basic
- Sensors / input devices: Sharp IR, 3x IR line sensors
- Target environment: indoors