



Short lived defective tracked robot
Hello! This is a tracked robot i did a couple of days ago. Unluckly, is suffered from a severe design fault so i disassembled yesterday :) I'm posting it the same becouse it's cool looking and my error could be useful for others.
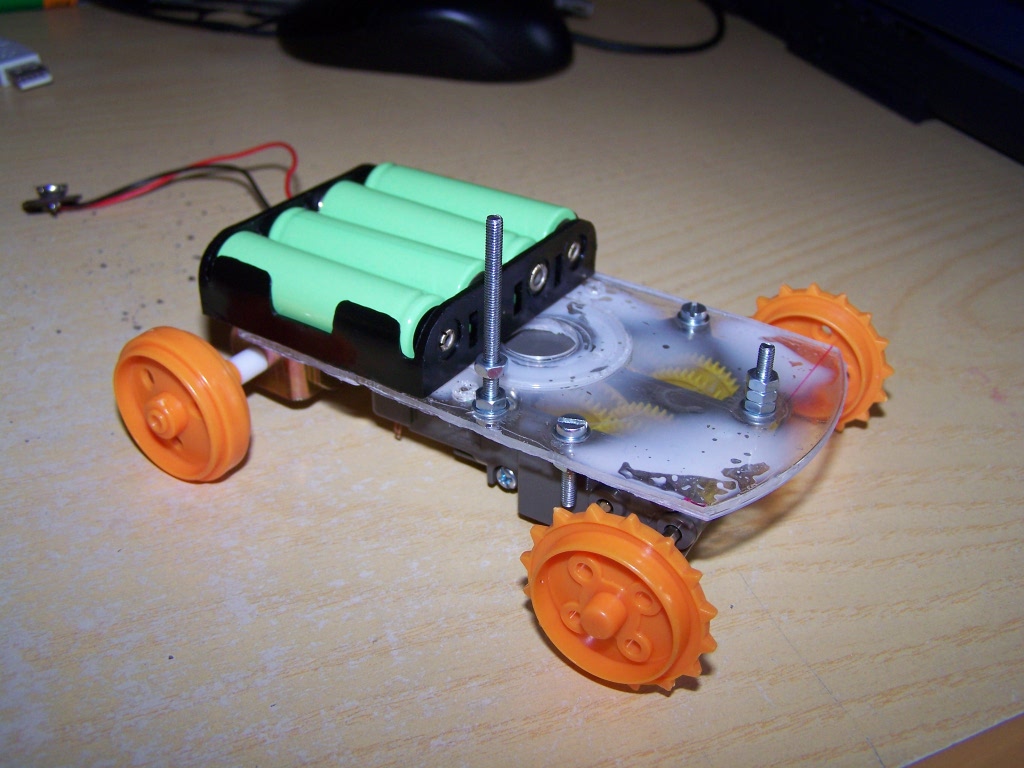
So the problem was that the battery pack (which is the heaviest part) was too high off the ground and too back on the robot, almost at the end of it. This resultedin a severe unbalance, so that even with the smallest step the robot goes upside down :) So learn from my mistakes and design carefully where your weights will be!
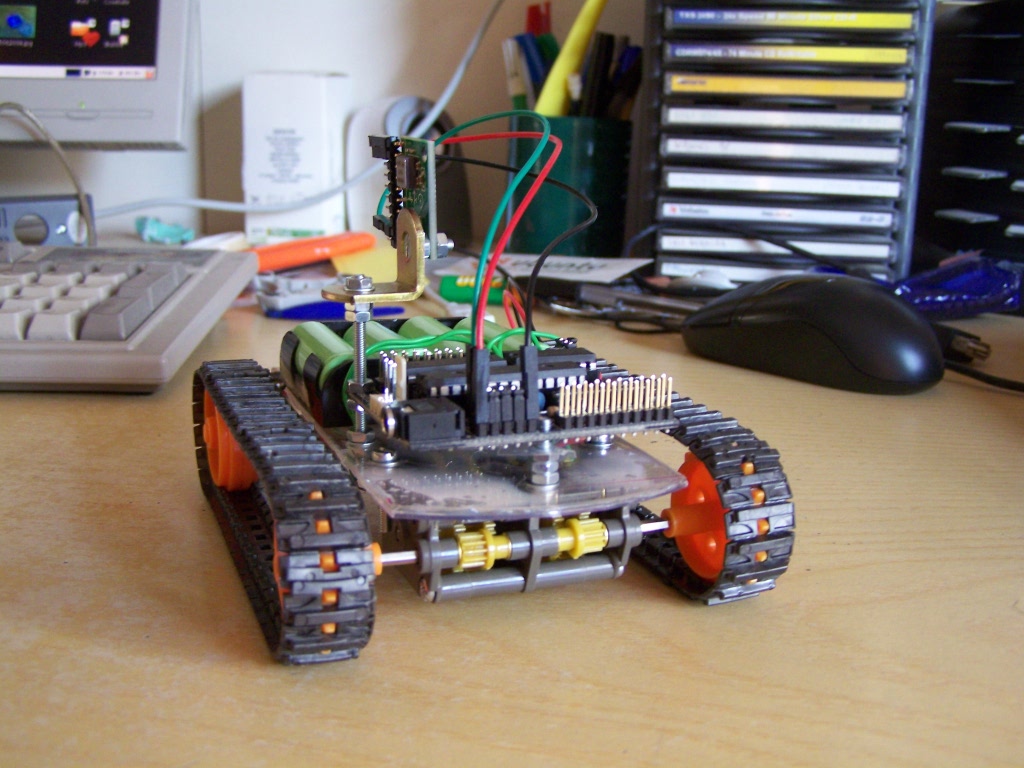
Anyway, i used my IMU sensor which is connected to a small mast to detect when the robot is too tilted and in danger of reversing. If it is, it will stop the motor and go back a little, turn around and restart.I used some smoothed acelerometer input, and it turned out it's very noisy when not filtered with some clever method. It worked but very often it have false positive while running without obstacles, just for the vibration of the robot. It was very informative test.
In the end this was a failure as robot but very useful for as a learning platform :)
Construction
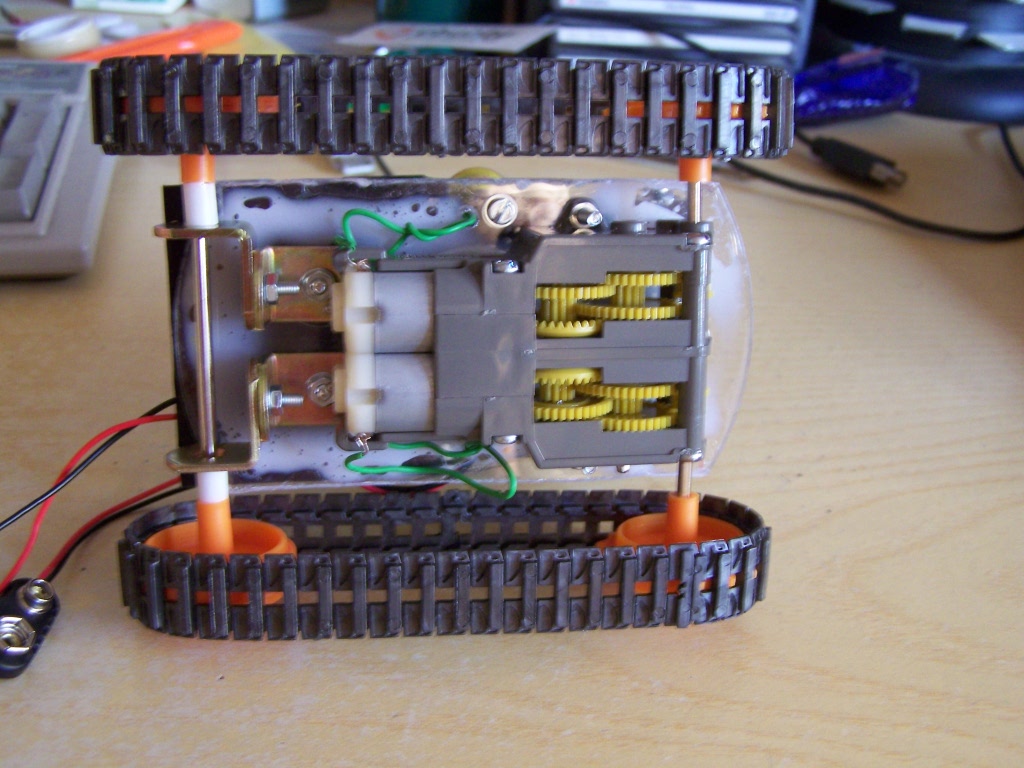
I used the classic Tamiya track set with the twin gear motors, together with a picaxe 28x1 and my favorite building material: sawed CD. This time to make it stronger i glued two together. It's a little ugly but working :) I also used of course bolt and nuts and a newly purchased set of L-shaped metal supports that are really useful.
Pictures
Detect when too tilted
- Actuators / output devices: Tamiya twin gearbox
- CPU: Picaxe 28x1
- Power source: 4 AA batteries
- Programming language: Picaxe basic
- Sensors / input devices: Sparkfun IMU
- Target environment: indoor