



Servo
This robot uses Mark Tildens H-Bridge design for motor drivers. The brains of the robot is a HEX inverter that until the Sharp IR detects an object the motors go forward.
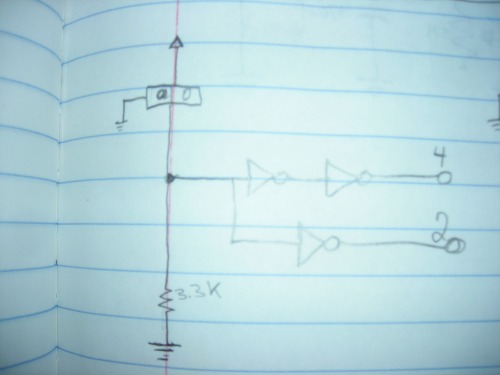
This is the schematic for the SHARP IR detector. I have all the schematics, but i dont have a scanner to get it off of my notebook so i apologize for the quality. the state of the motors are either forward or reverse depending if the IR detects any object. output 2 and 4 go to the forward and reverse input of the h-bridge.
I used the wheels of an old model airplane and just screwed them to the servo hornes.
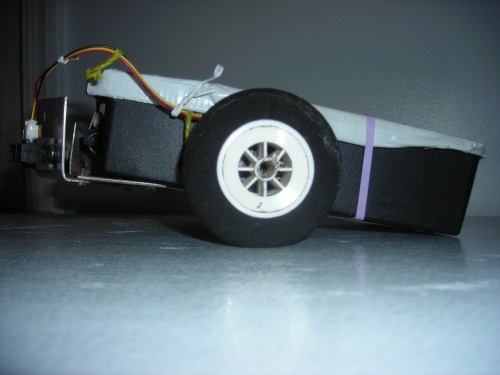
The servos are hacked...basically means i took out all the fancy stuff and just hooked two wires straight up to the positive and negative terminals of the motors. Also i had to take the mechanical stop out of the gear so that it could make a full 360 revolution.
<object width="480" height="385"><param name="movie" value="http://www.youtube.com/v/CtLN8BoMIlQ?fs=1&hl=en_US"></param><param name="allowFullScreen" value="true"></param><param name="allowscriptaccess" value="always"></param><embed src="http://www.youtube.com/v/CtLN8BoMIlQ?fs=1&hl=en_US" type="application/x-shockwave-flash" allowscriptaccess="always" allowfullscreen="true" width="480" height="385"></embed></object>
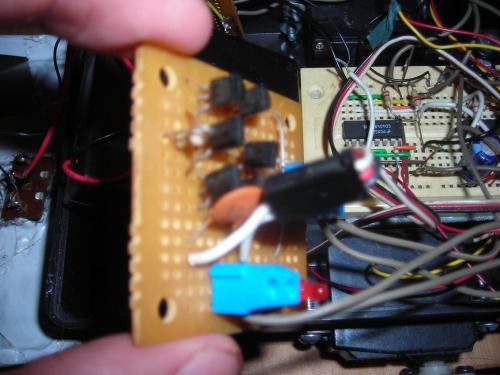
Here is a picture of the electrics.
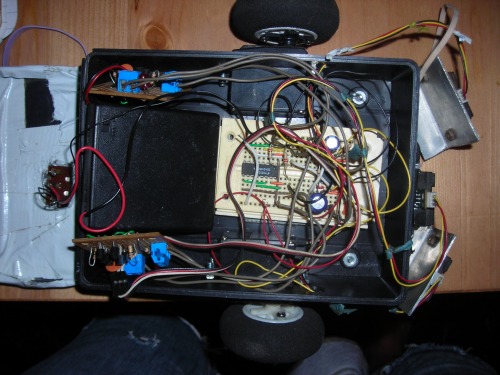
H-bridge upclose and personal.
Navigates via 3 Sharp IR detectors
- Actuators / output devices: Two servos modified for continuous rotation
- Control method: autonomous
- CPU: Hex inverter circuit
- Power source: 6v battery pack
- Sensors / input devices: 3xSharp IR GP2D12