


Semi Scratch Autonomous Tracked Robot
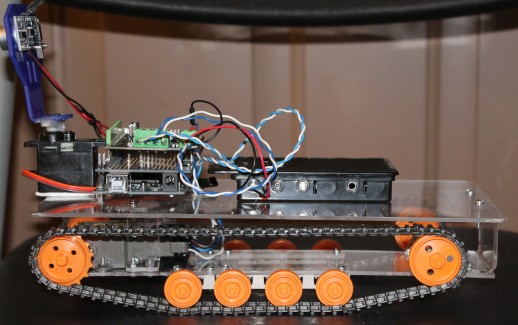
I am new to Arduino and robotics and this is my first real attempt to build a robot from scratch. It is Running a Arduino mega 2560 with a DFRobot L298P motor shield and using a Ultrasonic Module HY-SRF05 Distance Sensor. Soon i will add a HC-06 Bluetooth Module. I used a Tamiya Twin motor gearbox but i upgraded the motors to 6 v motors. I also used 2 Tamiya track and wheel sets to make a lager track chassis with as wheel base of about 10" x 4 1/2"
Parts:
Arduino Mega 2560
Arduino Mega Proto Shield
DFRobot L298P Motor Shield
Tamiya Twin Motor Gearbox
2 6V Motors
2 Tamiya Track and Wheel sets
HY-SRF05 Ultrasonic Distance Sensor Module
Hco6 Bluetooth Module
2 5mm Blue LED's
433Mhz wireless transmitter
I am going to add various sensors to the Robot and want the Sensor data to be sent wirteless to the serial consol.