



Self Made 6WD Mega Wild Thumper
Inspired from the DAGU wild thumper . I went down the road to make one myself .. a more powerful one .Respect to the creator OddBot. I am using 6 Pololu - 50:1 Metal Gearmotor 37Dx54L mm . The motors on the central panel are with encoders to keep track of the distance. The Project also includes a 5 DOF robotic arm also hand made. This is the progress .
The Alluminium chassis we hand moulded with a hammer :D

Next we worked on the suspension .. We used T-joint Pipes for holding the motors ..

We used these acrylic plastic circles to reduce the circumference for the metal rods to fit in.

The wheels are sadly made of plastic :( ..we used pig iron 2.5 inch shaft extenders to connect them to the motors.

Wheels ready to put in just like Oddbot taught us the suspension ..:D
Put in the electronics ,2 10-A H-bridges ... A Shield made on veroboard .. to connect everything to the Arduino Mega ADK
and some screw rods to hold the upper body and the arm at a distance and of course some paint . :D

And the Final look
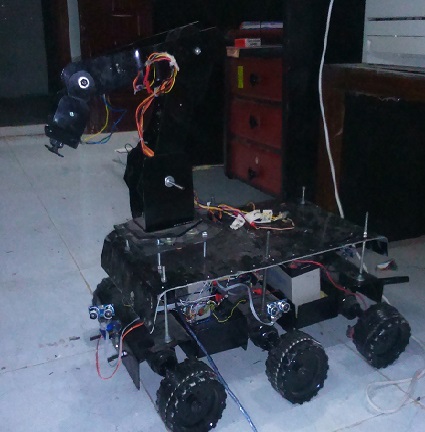
More details and videos soon :)
The arduino code is attached , the file warMachine.zip .. Any suggestions or requests will be appreciated :)
Navigate Around via ultrasonic Sensors , Has built in inverse kinematics for the Arm
- Actuators / output devices: Pololu - 50:1 Metal Gearmotor 37Dx54L mm with 64 CPR Encoder
- Control method: Semi-autonomous, Remotely Controlled Via Android App
- CPU: Arduino Mega ADK 2560
- Power source: 7.2V 1500mAh RC battery, 12V lead acid battery
- Programming language: C (Arduino)
- Sensors / input devices: Magnetic Wheel Encoders, HC-SR04 Ultrasonic Sensors.
- Target environment: Outdoor and Indoor environments